3D检测经典 | 第一个Anchor-Free、第一个NMS-Free 3D目标检测算法!!!(二)
4、实验5、参考[1].AFDet: Anchor Free One Stage 3D Object Detection.6、推荐阅读超实时语义分割 | DWR-Seg超越STDC-1/2、BiSeNet v1/v2,1080ti单卡320+FPSEfficient-HRNet | Efficien...
3D检测经典 | 第一个Anchor-Free、第一个NMS-Free 3D目标检测算法!!!(一)
在嵌入式系统上操作的高效点云3D目标检测对于包括自动驾驶在内的许多机器人应用来说都是重要的。大多数以前的工作都试图使用基于Anchor的检测方法来解决这个问题,这些方法有2个缺点:后处理相对复杂且计算昂贵调整Anchor参数很复杂本文是第一个使用Anchor-free和NMS-Free的单阶段检测器...

3D检测经典 | 第一个Anchor-Free、第一个NMS-Free 3D目标检测算法!!!
在嵌入式系统上操作的高效点云3D目标检测对于包括自动驾驶在内的许多机器人应用来说都是重要的。大多数以前的工作都试图使用基于Anchor的检测方法来解决这个问题,这些方法有2个缺点:后处理相对复杂且计算昂贵调整Anchor参数很复杂本文是第一个使用Anchor-free和NMS-Free的单阶段检测器...
一文尽览 | 基于点云、多模态的3D目标检测算法综述!(Point/Voxel/Point-Voxel)(下)
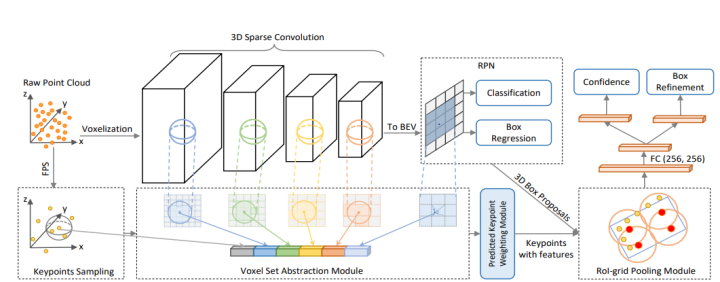
基于Point-VoxelPV-RCNN基于Point-Voxel方法是介于point-based和voxel-based之间的一种方式。PV-RCNN是首个经典point-based和voxel-based结合的网络,论文提出了Voxel Set Abstraction操作,将Sparse Con...
一文尽览 | 基于点云、多模态的3D目标检测算法综述!(Point/Voxel/Point-Voxel)(上)
原文首发微信公众号【自动驾驶之心】:一个专注自动驾驶与AI的社区(https://mp.weixin.qq.com/s/NK-0tfm_5KxmOfFHpK5mBA)目前3D目标检测领域方案主要包括基于单目、双目、激光雷达点云、多模态数据融合等方式,本文主要介绍基于激光雷达雷达点云、多模态数据的相关...
超全汇总 | 基于Camera的3D目标检测算法综述!(单目/双目/伪激光雷达)
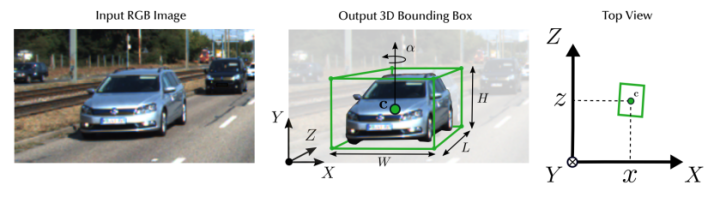
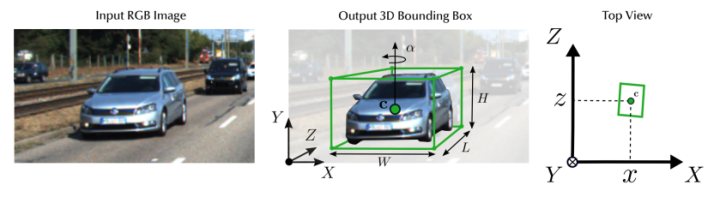
目前3D目标检测领域方案主要包括基于单目、双目、激光雷达点云、多模态数据融合等方式,本文主要介绍基于单目、双目和伪激光雷达数据的相关算法,下面展开讨论下~3D检测任务介绍3D检测任务一般通过图像、点云等输入数据,预测目标相比于相机或lidar坐标系的[x,y,z]、[h,w,l],[θ...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。









