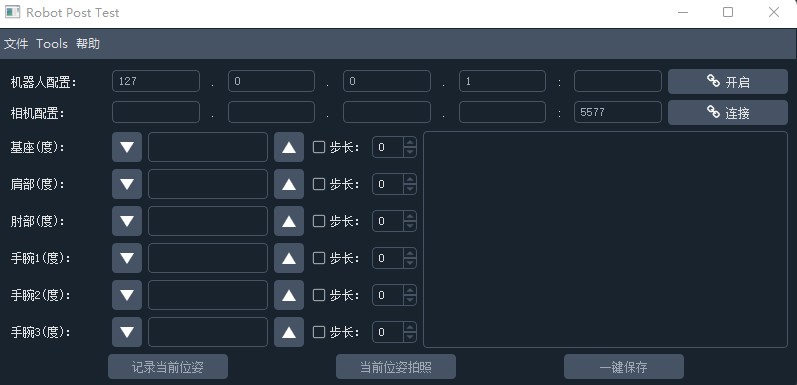
【UR六轴机械臂源码】python脱离示教器控制UR机械臂实时采集机器人位姿(优傲机器人)
背景描述 最近在做项目时,使用了ur六轴机器人,遇到了一些难题。起初对机械臂并不了解,通过一步步摸索,总结了一些小经验。本博客主要介绍,如何通过python与机器人建立通信,实时调整机器人位姿并保存TCP位姿和关节角位姿。 ...
ROS 2机器人编程实战:基于现代C++和Python 3实现简单机器人项目
ROS 2是机器人开发领域中广泛使用的一个框架,ROS 2提供了很多功能强大的工具和库,可以让机器人开发人员更加高效地进行开发。本文将介绍ROS 2机器人编程实战,基于现代C++和Python 3语言。一、ROS 2简介ROS 2是机器人操作系统(Robot Operating System)的第二...
Python 机器人学习手册:6~10
Python 机器人学习手册:6~10
Python 机器人学习手册:1~5
一、机器人操作系统入门本书的主要目的是教您如何从头开始构建自动移动机器人。 机器人将使用 ROS 进行编程,其操作将使用名为 Gazebo 的模拟器进行模拟。 在接下来的章节中,您还将看到使用 ROS 的机器人的机械设计,电路设计,嵌入式编程和高级软件编程。在本章中,我们将从 ROS 的基础知识,如...
![【Python数据结构与算法】--- 递归算法的应用 ---[乌龟走迷宫] |人工智能|探索扫地机器人工作原理](https://ucc.alicdn.com/pic/developer-ecology/r24d6wvaectxw_c4a62d4335e54857be87d7891c64e18f.png)
【Python数据结构与算法】--- 递归算法的应用 ---[乌龟走迷宫] |人工智能|探索扫地机器人工作原理
导言 乌龟探索迷宫这个问题与机器人领域也有关系,如果我们有一个Roomba扫地机器人,我们或许可以利用乌龟探索迷宫这个问题的解决方法对扫地机器人进行重新编程.解决过程 首先,要建立数据结构1.建立数据结构我们将整个迷宫的空间(矩形)分为行列整齐的方格,区分出墙壁和通道给每个方格具有行列位置,并赋予“...
钉钉开发企业内部机器人,这个有没有python?
钉钉开发企业内部机器人,这个有没有python、php的SDKhttps://open.dingtalk.com/document/orgapp/robot-receive-message?](https://ucc.alicdn.com/pic/developer-ecology/jsm43v22fygxw_0e63c248d8274a398d3dd7a966c4ac61.png)
【Python自然语言处理+tkinter图形化界面】实现智能医疗客服问答机器人实战(附源码、数据集、演示 超详细)
需要源码和数据集请点赞关注收藏后评论区留言私信~~~一、问答智能客服简介QA问答是Question-and-Answer的缩写,根据用户提出的问题检索答案,并用用户可以理解的自然语言回答用户,问答型客服注重一问一答处理,侧重知识的推理。从应用领域视角,可将问答系统分为限定域问答系统和开放域问答系统。...
动态规划法在扫地机器人中的实战应用(基于动作值函数的策略迭代 python 附源码)
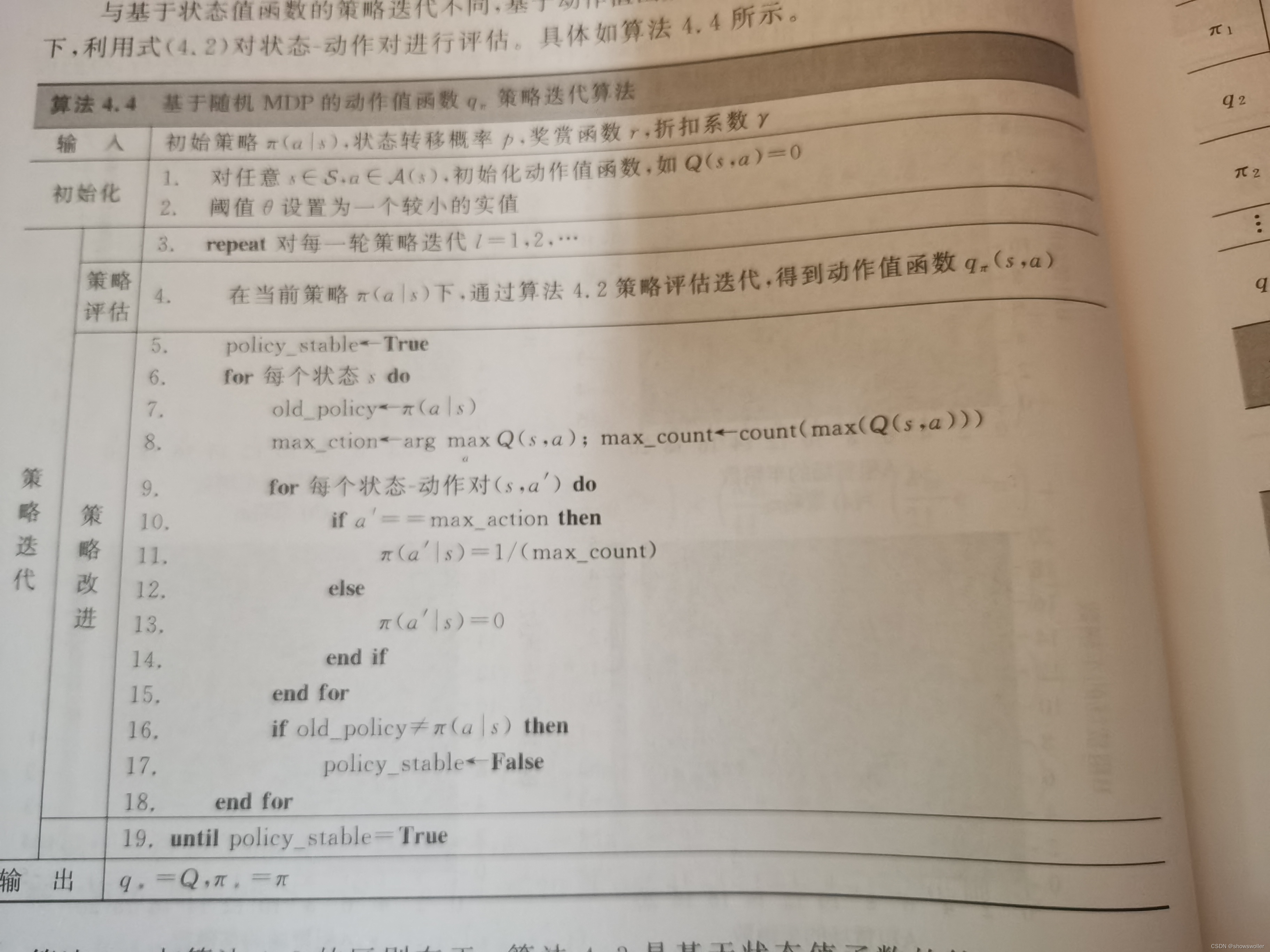
需要源码或觉得有帮助请点赞关注收藏后评论区留下QQ邮箱或者私信博主与基于状态值函数的策略迭代不同,基于动作值函数的策略迭代是在当前策略下用另一个式子进行评估。关于条件描述和环境搭建可以参考我这篇博客扫地机器人简介算法步骤如下下面通过基于动作值函数的策略迭代算法应用于确定环境的扫地机器人任务中,经过多...
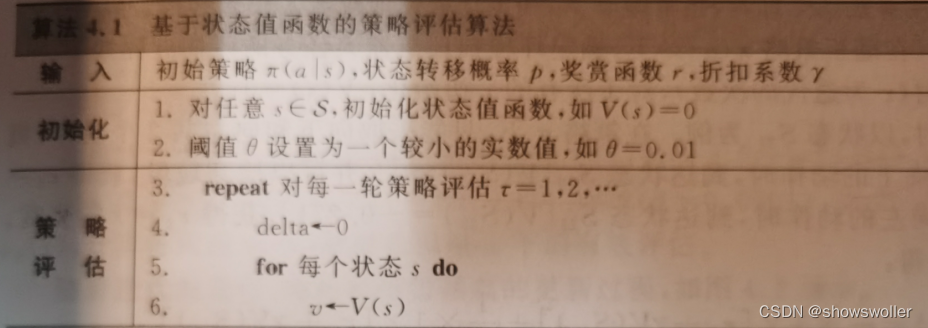
动态规划法和策略迭代在扫地机器人中确定状态值和动作值函数的策略评估(python实现 附源码 超详细)
觉得有帮助或需要源码请点赞关注收藏后评论区留言或私信博主要在强化学习中,动态规划法主要用于求解有模型的MDP问题,尽管在现实任务中难以获得完备的环境模型,且动态规划法需要消耗大量的计算资源,但是作为强化学习的基础,动态规划法仍然具有非常重要的理论意义。动态规划法主要包括基于模型的策略迭代和基于模型的...
深度强化学习之gym扫地机器人环境的搭建(持续更新算法,附源码,python实现)
想要源码可以点赞关注收藏后评论区留下QQ邮箱本次利用gym搭建一个扫地机器人环境,描述如下:在一个5×5的扫地机器人环境中,有一个垃圾和一个充电桩,到达[5,4]即图标19处机器人捡到垃圾,并结束游戏。同时获得+3的奖赏。左下角[1,1]处有一个充电桩,机器人到达充电桩可以充电且不再行走,获得+1的...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。