
ubuntu16.04下ROS操作系统学习笔记(三 / 三)ROS基础-实现分布式通信
ROS是分布式的节点,这样的话我们就可以将程序运行上的节点放到大型机器上面,分担机器人运行的压力。接下来我们来看一下怎么实现分布式通讯,怎么在多机上运行统一的程序。ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合。那么我们如何来实现分布式多机通讯呢:设置IP地址,确保底层链路的联通,假设...
ubuntu16.04下ROS操作系统学习笔记(三 / 二)ROS基础-ROS通信编程(下)
我们接下来看一下怎么实现一个服务端,实现服务器的编程:我们在这个功能包下面的src文件夹下面创建一个server.cpp文件:一个服务器的实现也需要分成四个步骤:初始化ROS节点;创建Server实例;循环等待服务请求,进入回调函数;在回调函数中完成服务功能的处理,并反馈应答数据。其代码与之前的比较...

ubuntu16.04下ROS操作系统学习笔记(三 / 二)ROS基础-ROS通信编程(上)
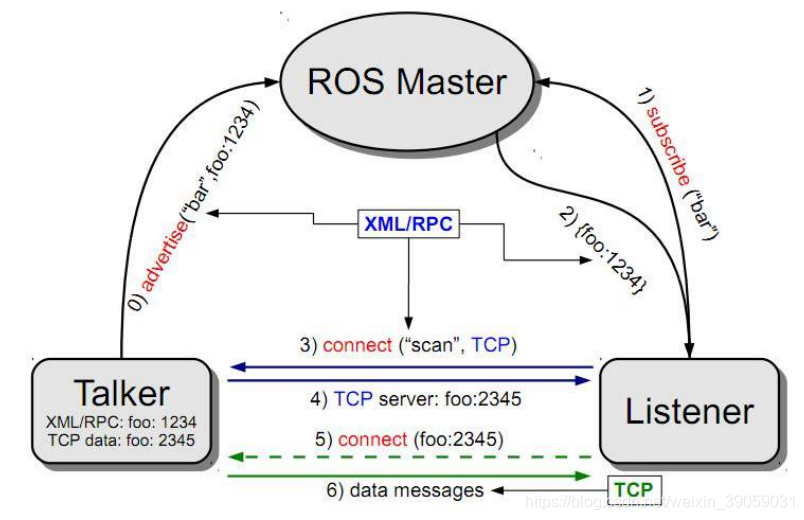
1.话题编程首先我们要有一个发布话题的Talker,还要有一个订阅话题的Listener,然后就是负责管理整个系统的ROS Master。话题编程的流程主要是以下四个步骤:创建发布者创建订阅者添加编译选项运行可执行程序上面的前两步是编程实现的,第三步是通过编译的方式生成可执行文件。最后一步就是去运行...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。







操作系统学习笔记相关内容
- 操作系统学习笔记io
- 计算机操作系统学习笔记
- 操作系统学习笔记内存管理
- 操作系统学习笔记结构
- 计算机操作系统学习笔记结构
- 操作系统描述学习笔记
- 计算机操作系统慕课学习笔记
- ubuntu16.04 ros操作系统学习笔记moveit
- ubuntu16.04 ros操作系统学习笔记
- ubuntu16.04 ros操作系统学习笔记机器人slam
- ubuntu16.04 ros操作系统学习笔记组件
- ubuntu16.04 ros操作系统学习笔记通信编程
- 操作系统学习笔记管理
- 操作系统学习笔记文件管理
- 操作系统学习笔记线程调度同步互斥
- 操作系统学习笔记同步
- 操作系统学习笔记调度
- 操作系统学习笔记计算机系统
- 操作系统概念学习笔记
- 操作系统概念学习笔记死锁
- 操作系统概念学习笔记进程同步
- 操作系统概念学习笔记结构