【STM32】I2C练习,HAL库读取MPU6050角度陀螺仪
MPU6050简介 MPU-6000(6050)为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。当连接到三轴磁强计时,MPU-60X0提供完整的9轴运动融合输出到其主I2C或SPI端口(SPI仅在MPU-6000上可用)。 寄存器查...
STM32F407软件模拟I2C实现MPU6050通讯(CUBEIDE)(下)
复位,读取温度,角度等函数封装mpu6050.c#include "mpu6050.h" #include "mpu6050_iic.h" #include "usart.h" #include "main.h" /** * @brief MPU6050硬件初始化 * @p...

STM32F407软件模拟I2C实现MPU6050通讯(CUBEIDE)(上)
代码工程https://download.csdn.net/download/weixin_52849254/87886797模拟I2C读写的实现mpu6050_iic.c/** ************************************************************...
STM32F407硬件I2C实现MPU6050通讯(CUBEIDE)
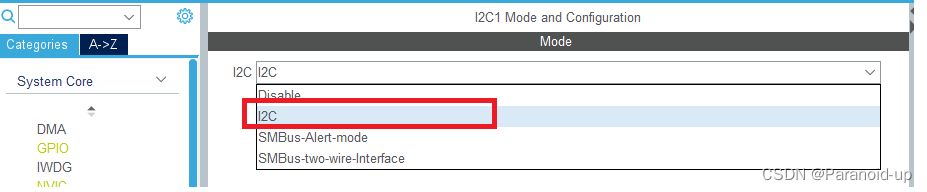
工程代码https://download.csdn.net/download/weixin_52849254/87886714cubeide设置I2C1通道可选择三种不同的通讯协议:I2C、SMBus-Alert-mode、SMBus-two-wire-Interface。SMBus (System...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
社区圈子
