模拟Stevens & Lewis描述的小型飞机纵向动力学的非线性动态反演控制器研究(Matlab代码实现)
💥1 概述针对Stevens和Lewis描述的小型飞机纵向动力学的非线性动态,研究非线性动态反演控制器可以是一个有趣的课题。动态反演控制器的目标是通过了解系统的动力学方程和状态信息,从而在实时中实现对系统的反演和控制。下面是研究步骤:1. 系统建模:首先,你需要建立小型飞机的纵向动力学模型。这可能...
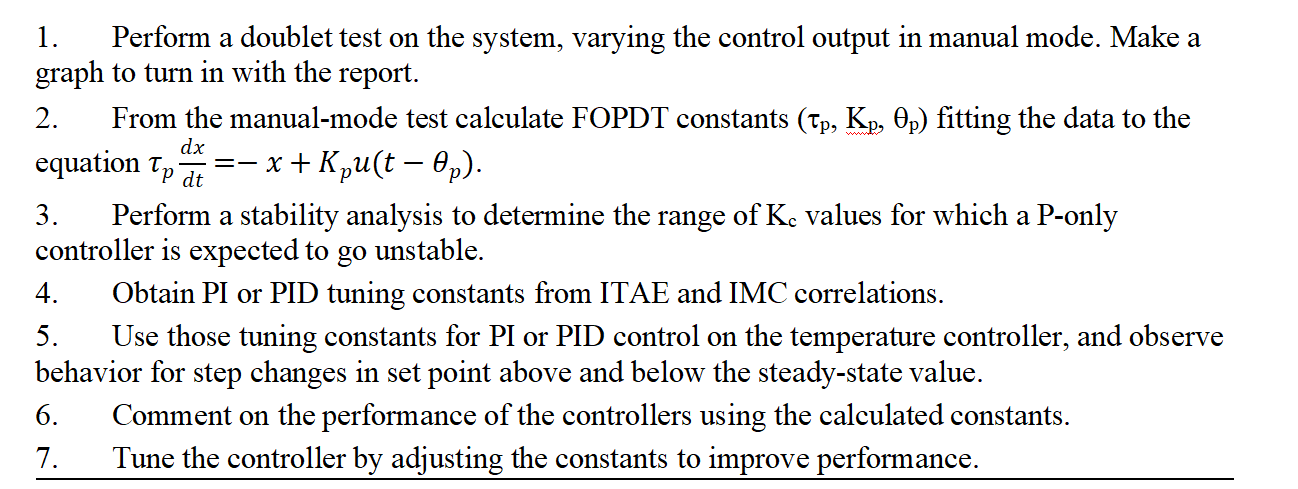
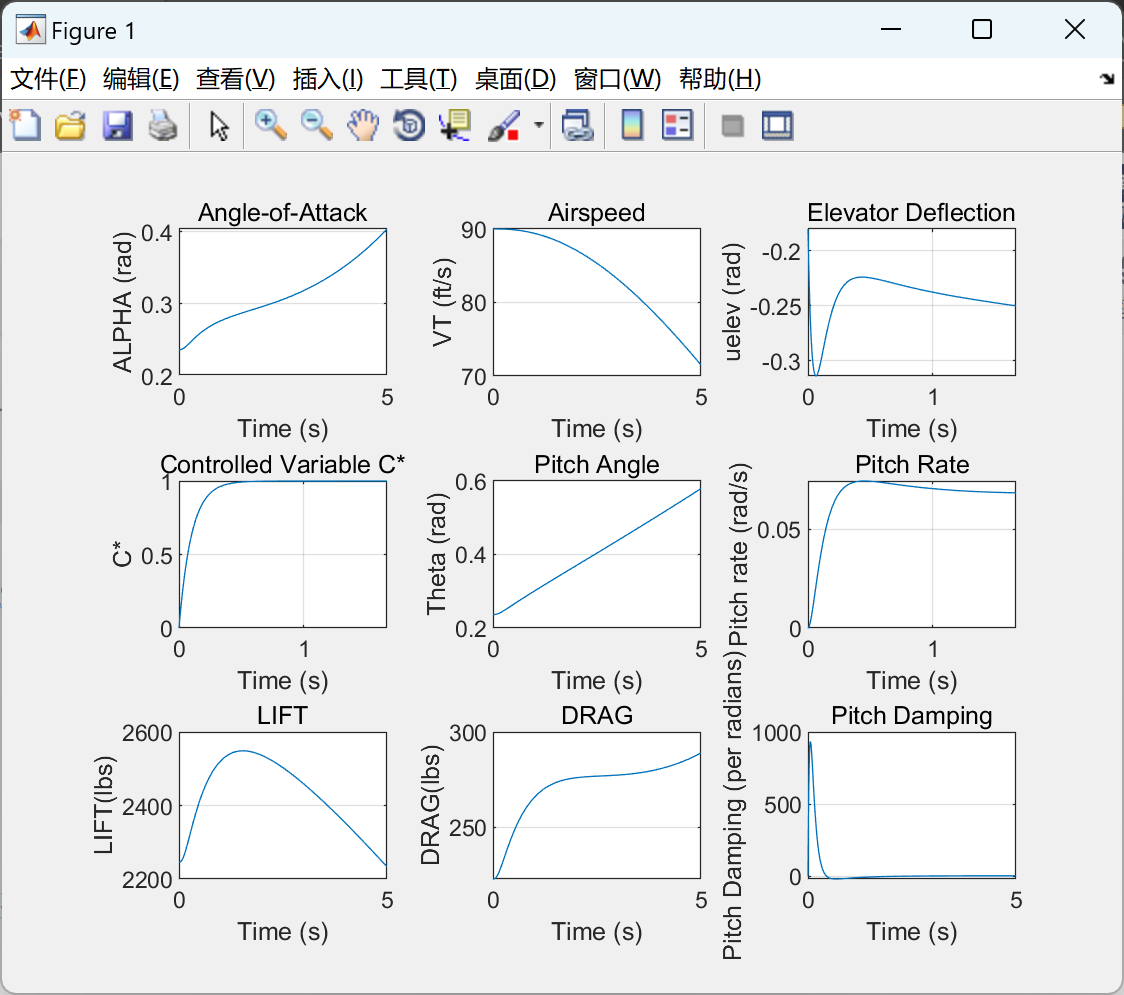
【GUI】使用PID控制器进行台式过程控制实验,以保持热敏电阻的温度(Matlab代码实现)
💥1 概述本实验是温度控制的反馈控制应用。特别是,本实验讲解:手动和自动控制的区别 生成动态数据的步进测试 拟合动态数据以构建简单的一阶加死区时间 (FOPDT) 模型从标准调整规则获取 PID 控制的参数 调整 PID 控制器以提高性能稳定性分析具有第一性原理的动态建模 动态数据对账模型预测控制...
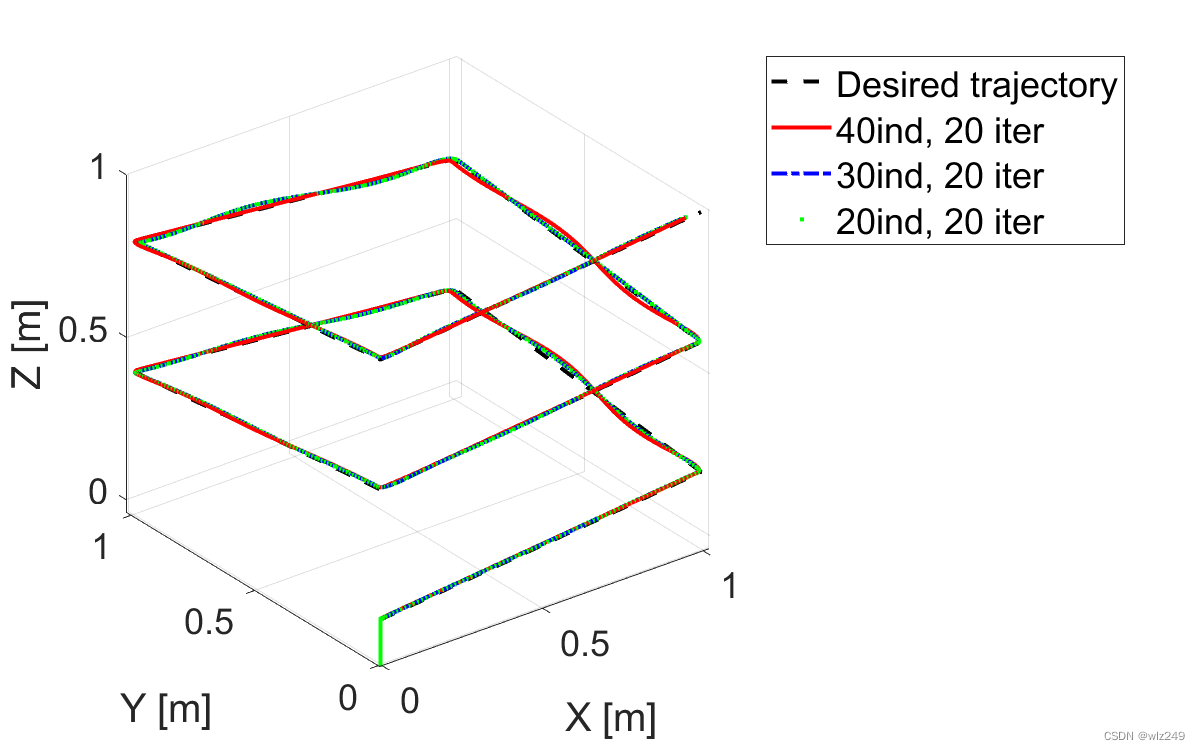
使用HGS算法调整PD控制器增益的无人机动态性能数据——基于启发式的无人机路径跟踪优化(Matlab代码实现)
💥1 概述基于无人机导航系统的自身特点,无人机在导航过程中会出现无法精确定位的情况,从而产生定位误差。如果不能及时校正随时间累积的定位误差,会使无人机无法到达预定目的地,从而导致飞行任务失败。为避免这种情况的发生,研究了考虑定位误差的无人机航迹快速规划问题。以航迹距离最短为目标,考虑定位误差校正约...
用于调整PID控制器增益的遗传算法的实现(Matlab代码实现)
🍁🥬🕒摘要🕒🥬🍁该存储库包含遗传算法 (GA) 的实现,用于调整 PID 控制器的增益。 本研究的重点是无人机(UAV)上使用的PID控制器。 autotuning_script.m: 这是一个独立的文件,...
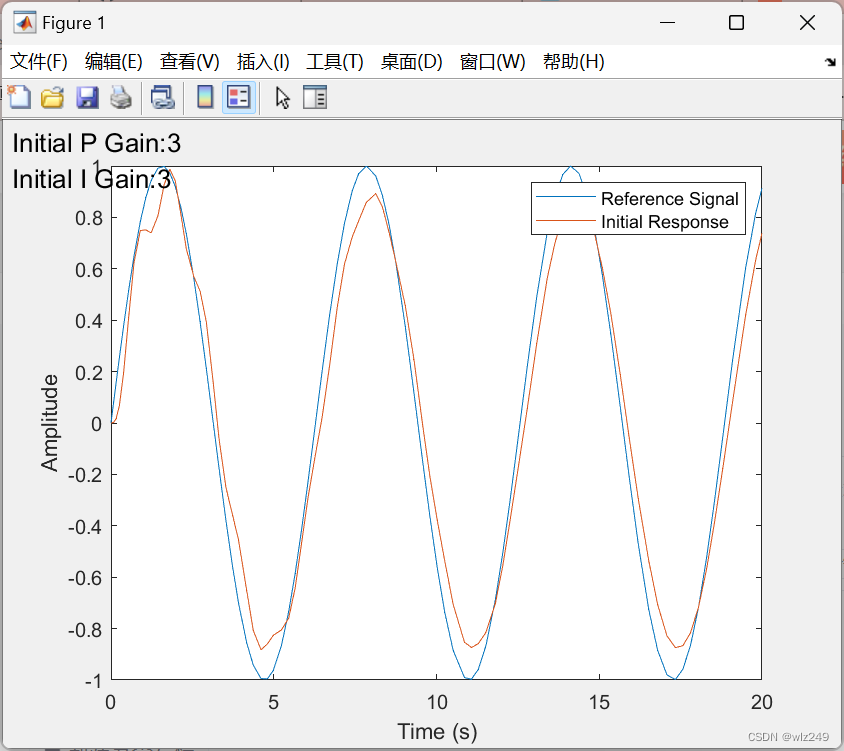
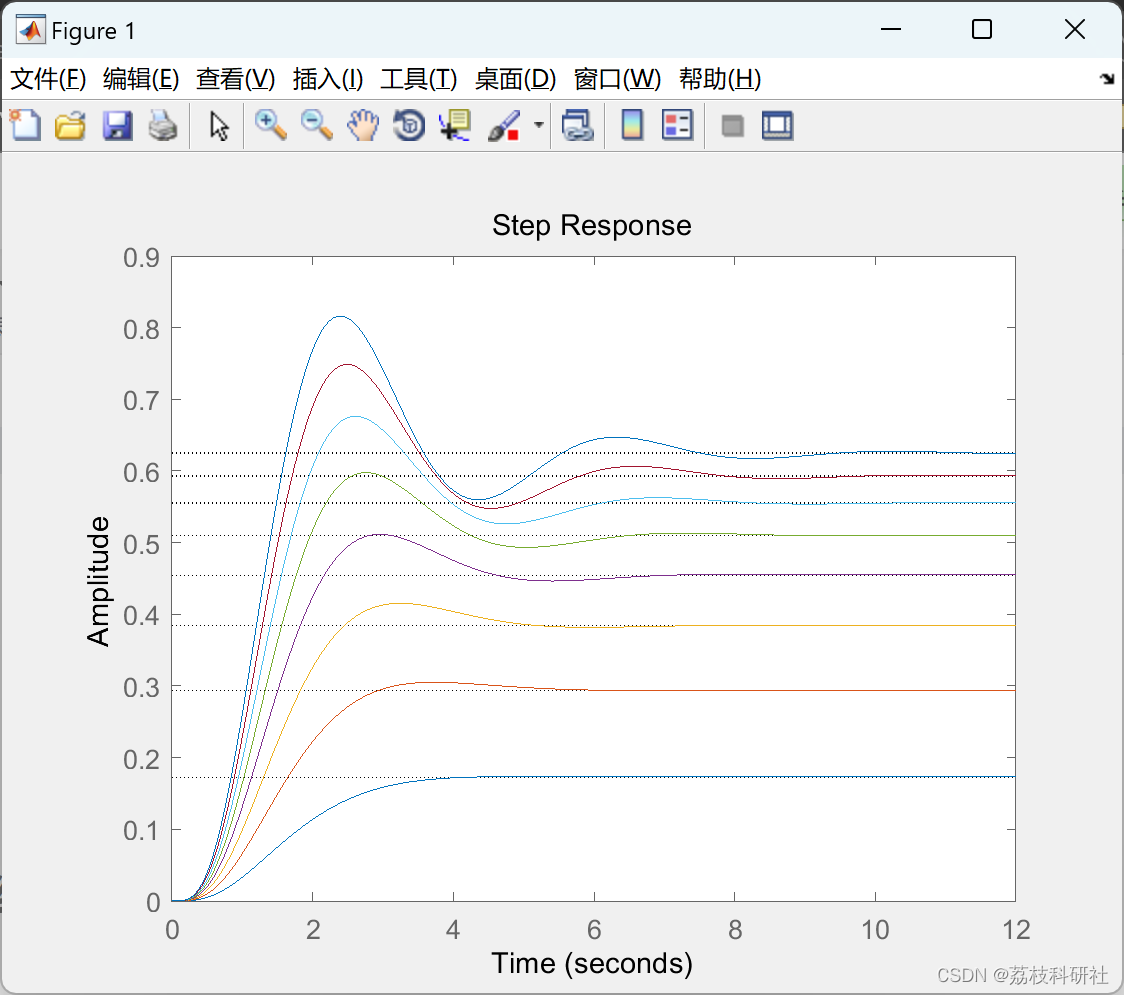
【抗扰PID控制】干扰抑制PID控制器研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。⛳️座右铭:行百里者,半于九十。📋📋...
一种对不同类型齐格勒-尼科尔斯 P-I-D 控制器调谐算法研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。⛳️座右铭:行百里者,半于九十。📋📋...
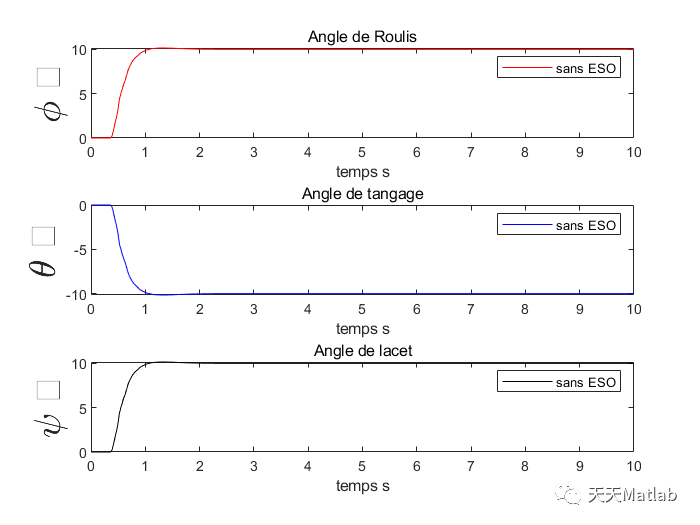
【无人机控制】基于鲁棒反馈线性化控制器实现无人机 (UAV) 姿态控制附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。🍎个人主页:Matlab科研工作室🍊个人信条:格物致知。更多Matlab仿真内容点击👇智能优化算法 神经网络预测 雷...
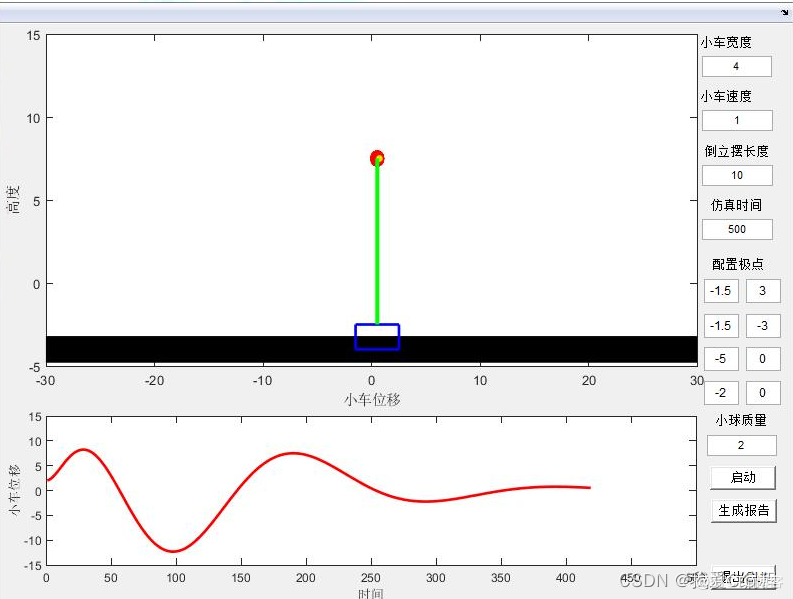
m一级倒立摆的动态模拟和零极点配置控制器matlab仿真
1.算法仿真效果matlab2022a仿真结果如下: 2.算法涉及理论知识概要 倒立摆是一个开环不稳定的强非线性系统,其控制策略与杂技运动员顶杆平衡表演的技巧有异曲同工之处,目的在于使得摆杆处于临界稳定状态,是进行控制理论研究的典型实验平台。20世纪50年代,麻省理工学院的控制论专家根据火箭助推器原...
m基于FPGA的PID控制器实现,包含testbench测试程序,PID整定通过matlab使用RBF网络计算
1.算法仿真效果vivado2019.2、matlab2022a仿真结果如下: 2.算法涉及理论知识概要 PID控制器产生于1915年,PID控制律的概念最早是由LYAPIMOV提出的,到目前为止,PID控制器以及改进的PID控制器在工业控制领域里最为常见。PID控制器(比例-积分-微分控制器),由...
m基于UKF控制器的倒立摆控制系统matlab仿真
1.算法仿真效果matlab2022a仿真结果如下: 2.算法涉及理论知识概要 倒立摆控制,使摆杆尽快达到平衡位置,且无大的振荡和过大的角度和速度的控制系统。当摆杆到达期望位置后,系统能克服随机扰动而保持稳定。该控制系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望值,计算机在每一个采样周期中采集...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。