Baumer堡盟工业相机BGAPI SDK联合OpenCV进行Bayer图像转换(C++)
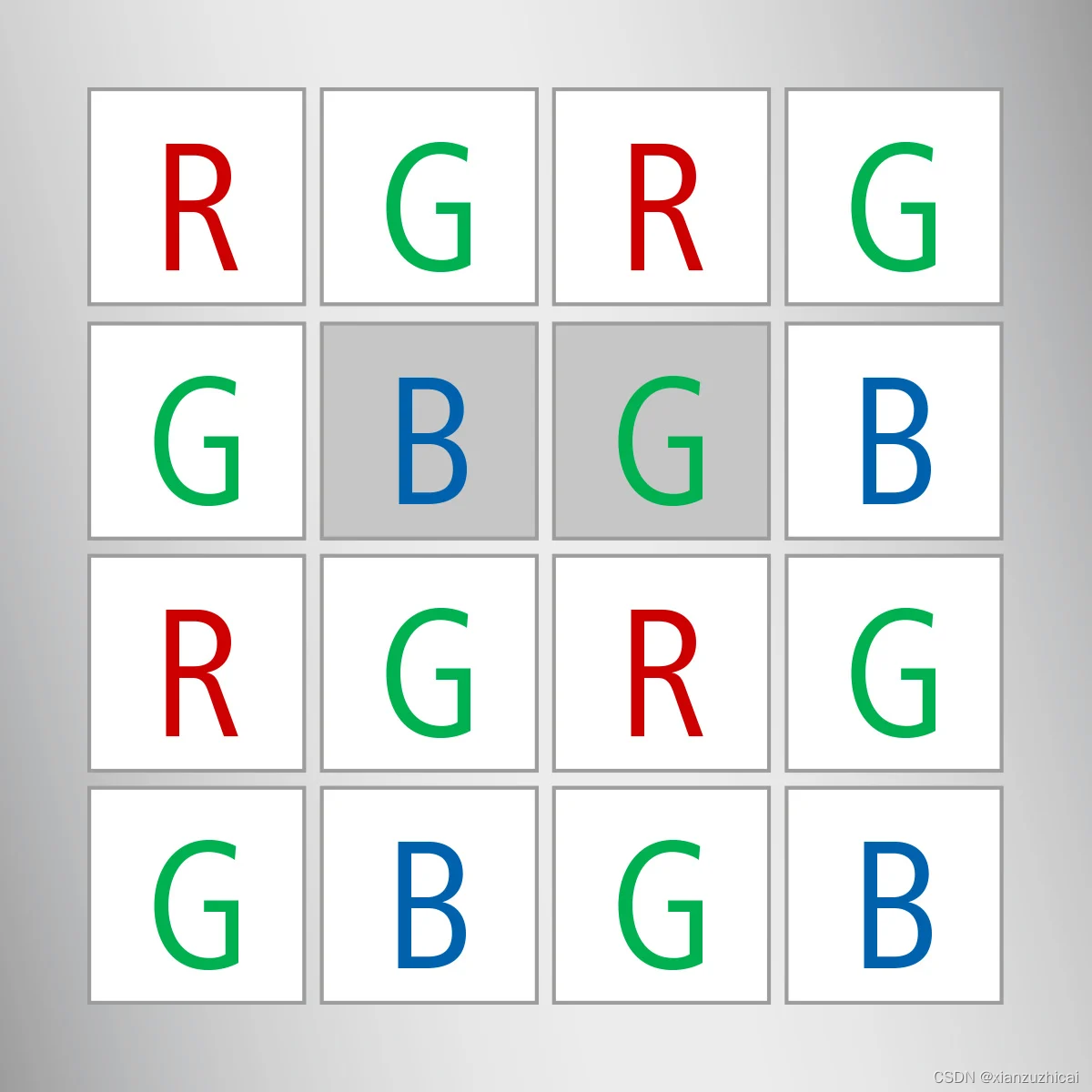
(C++)本文介绍Baumer堡盟工业相机BGAPI SDK联合OpenCV进行Bayer图像转换Bayer像素格式Bayer像素格式广泛用于CCD和CMOS相机。采用Bayer格式,可以从一个单独的平面得到彩色图像,该平面上的R、G和B像素点(即特定分量的传感器)交错排列(如左图所...
Baumer堡盟工业相机BGAPI SDK联合OpenCV进行图像转换三(C#)
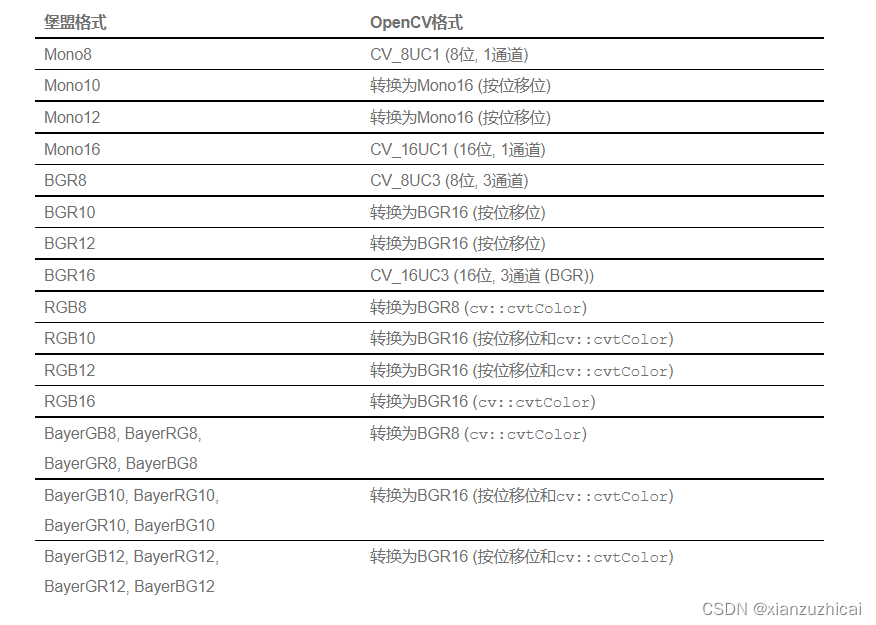
堡盟相机支持Mono8、Mono12、BGR8等多种像素格式(PixelFormat)——每种格式需对应相应的OpenCV格式。与堡盟相机像素格式对应的OpenCV矩阵类型如下表所示。从如下示例可以看出,可直接处理像素格式的图像,无需转换,非常简单。示例:Mono8mDevice.RemoteNod...
Baumer堡盟工业相机BGAPI SDK联合OpenCV进行图像转换二(C#)
(C#)本操作说明将介绍如何将图像从堡盟GAPI帧缓冲区传输至OpenCV,以便进一步处理。首先,使用堡盟GAPI SDK设置堡盟相机,并将图像采集到内存,然后将内存中的图像传输至OpenCV,以便将其保存到硬盘上。图像传输到OpenCV后,即可根据需要使用该视觉库进一步处理图像。将堡...
Baumer堡盟工业相机BGAPI SDK联合OpenCV进行图像转换一(C#)
本操作说明将介绍如何将图像从堡盟GAPI帧缓冲区传输至OpenCV,以便进一步处理。首先,使用堡盟GAPI SDK设置堡盟相机,并将图像采集到内存,然后将内存中的图像传输至OpenCV,以便将其保存到硬盘上。图像传输到OpenCV后,即可根据需要使用该视觉库进一步处理图像。new Emgu.CV.M...
Baumer工业相机堡盟工业相机的BGAPI SDK联合OpenCV进行图像转换二(C++)
Baumer堡盟工业相机BGAPI SDK联合OpenCV进行图像转换二(C++)Baumer工业相机Baumer工业相机SDK和OpenCV联合技术背景第一步:在BGAPI SDK中成功连接Baumer相机第二步:在SDK中使用OpenCV处理图像第三步:注意事项代码分享Baumer工业相机Bau...
相机标定 matlab opencv ROS三种方法标定步骤(2)
二 ubuntu下Opencv的相机标定 一般直接用Opencv的源码就可以进行相机的标定,但是可能只是会实现结果,却不懂实现的过程,我也是模模糊糊的看了《计算机视觉中的多视图几何》以及实现一些经典的算...
相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun rqt_graph rqt...
相机标定 matlab opencv ROS三种方法标定步骤(1)
一 、 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 &...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。


