【FCN】端到端式语义分割的开篇之作! 从中窥探后续语义分割网络的核心模块(一)
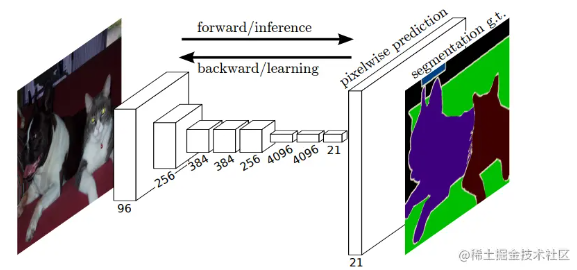
前言 《Fully Convolutional Networks for Semantic Segmentation》(后续将以《FCN》替代)是由Jonathan Long、Evan Shelhamer和Trevor Darrell等人在2015年发表的论文。该论文提出了一种基于全卷积神经网络...
【CVPR2017】AOD-Net:端到端的除雾网络(原理&实操)
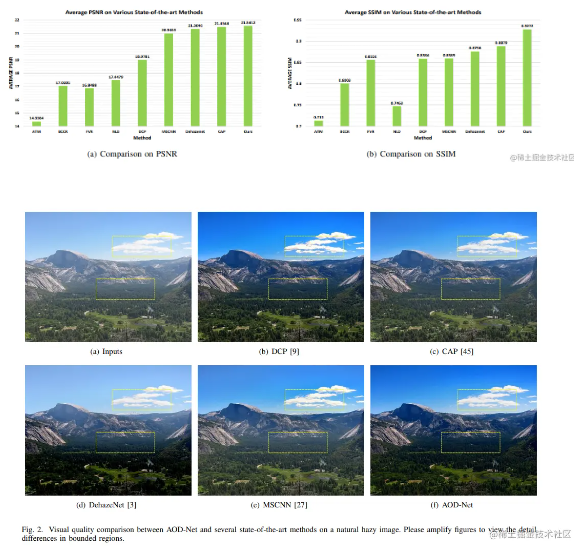
前言 由于AOD-Net网络是2017年的顶刊论文,在网上也有相当多的讲解,因此本文中将不会过多赘述论文中的内容,仅摘取精华进行讲解。 导读 AOD-Net 是一种用于图像去雾的深度神经网络模型,旨在通过对图像进行学习和分析,从中提取出场景中的深度信息,从而去除图像中的雾霾。AOD-Net ...

m基于matlab的无线自组网性能仿真,包括端到端时延,吞吐量,初入网时间,迟入网时间,网络建立时间
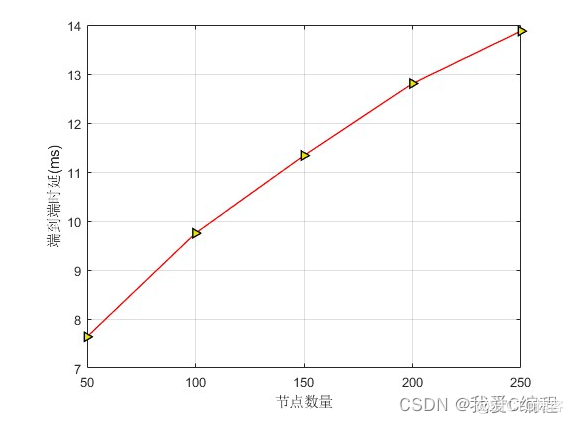
1.算法仿真效果matlab2022a仿真结果如下: 2.算法涉及理论知识概要 无线自组网(Wireless Ad Hoc Network,简称WANET)是一种无需基础设施支持的网络,它由一组移动的无线节点组成,这些节点可以自组织形成一个网络,实现数据的传输和共享。由于WANET是一种去中心化的网...
首篇!BEV-Locator:多目端到端视觉语义定位网络(清华&轻舟智航)(下)
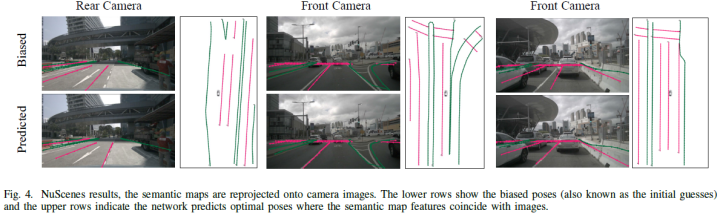
实验和讨论nuScenes数据集结果NuScenes数据集包含城市地区的700个训练场景和150个测试场景,图像由6个环视摄像机拍摄。论文在nuScenes数据集上进行实验,以验证BEV定位器的有效性(用35个epoch训练)。论文从地图界面中提取地图元素。元素类型包括道路边界、车道分隔线和人行横道...

首篇!BEV-Locator:多目端到端视觉语义定位网络(清华&轻舟智航)(上)
摘要准确的定位能力是自动驾驶的基础。传统的视觉定位框架通过几何模型来解决语义地图匹配问题,几何模型依赖于复杂的参数调整,从而阻碍了大规模部署。本文提出了BEV定位器:一种使用多目相机图像的端到端视觉语义定位神经网络。具体地,视觉BEV(鸟瞰图)编码器提取多目图像并将其展平到BEV空间中。而语义地图特...
端到端的时延构成中的网络层传输时延包括什么?
端到端的时延构成中的网络层传输时延包括什么?
端到端的时延构成中的网络层传输时延的定义是什么?
端到端的时延构成中的网络层传输时延的定义是什么?
为什么说5G SA(独立组网)为端到端网络切片技术、多接入边缘计算技术的实现以及面向行业的应用创造了
为什么说5G SA(独立组网)为端到端网络切片技术、多接入边缘计算技术的实现以及面向行业的应用创造了基础条件?

高德算法大赛冠军战队经验分享:端到端分类网络、多模型融合...
高德地图联合阿里云天池平台举办的AMAP-TECH算法大赛已经落幕。本次大赛以“基于车载视频图像的动态路况分析”为赛题,赛题来源于高德真实的业务场景。路况信息不仅影响用户选择出行路线、出行方式、预估到达的时间,对于交通管理部门和城市规划部门也有重要的价值。相关内容燃爆视频!高德地图首届算法大赛落幕 ...
蚂蚁金服 mPaaS 服务端核心组件:亿级并发下的移动端到端网络接入架构解析
根据《mPaaS 服务端核心组件体系概述:移动 API 网关 MGS》,我们已经初步了解 mPaaS 服务端众多组件中移动 API 网关 MGS 的具体架构设计和简介。 本文结合贾岛在 TGO 鲲鹏会举办的「走进蚂蚁金服:双十一背后的蚂蚁金服技术支持」活动现场分享内容《亿级并发下的蚂蚁移动端到端网络...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
产品推荐

社区圈子




最佳实践




