西门子S7-200 SMART PID控制实例,如何配置PID向导、调用子程序?如何创建状态图表测试程序?如何自整定PID参数?
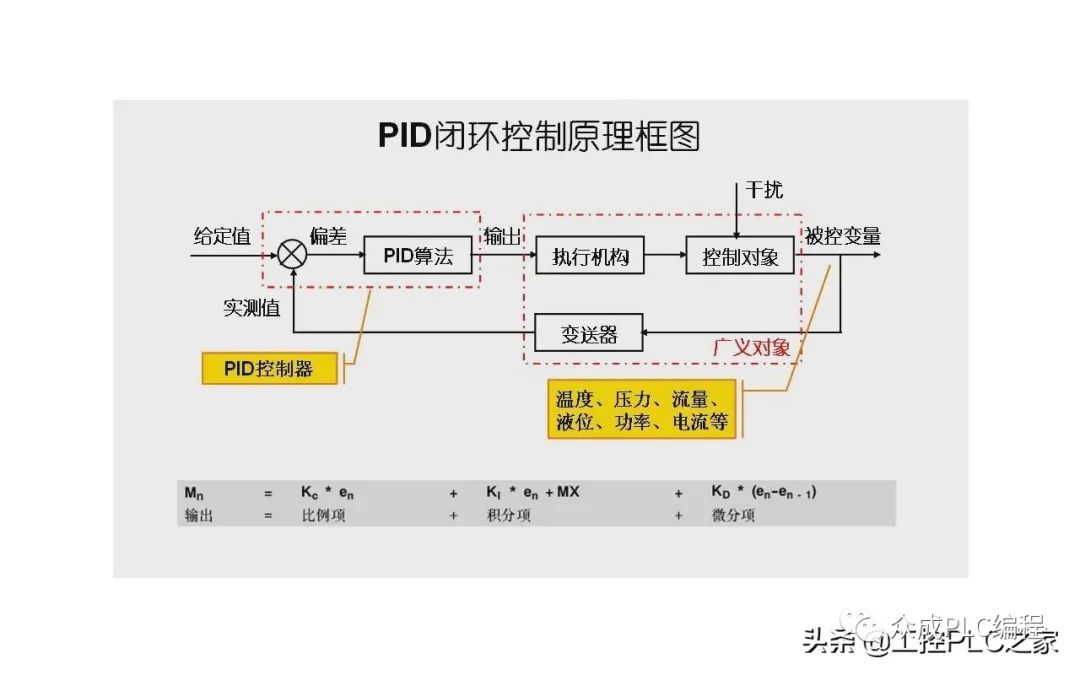
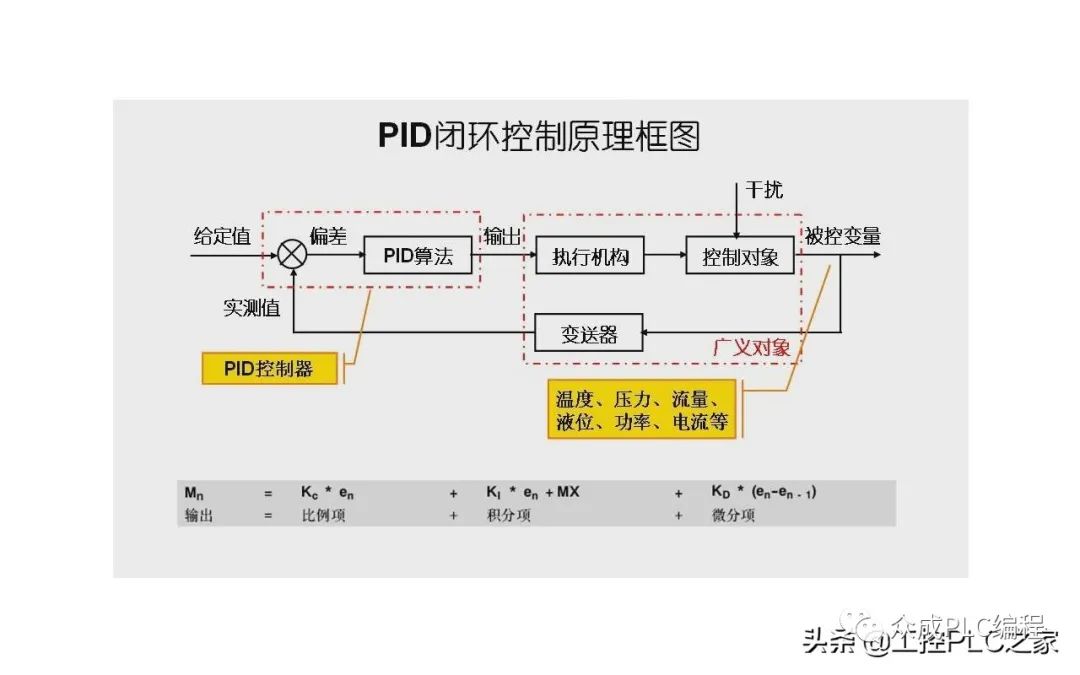
PID控制器是应用最广泛的闭环控制器,它根据给定值与被控变量实测值之间的偏差,按照PID算法计算出控制器的输出量控制执行机构进行调节,使被控量跟随给定量进行变化并使系统达到稳定,自动消除各种干扰对控制过程的影响,其中P、I、D分别指比例、积分、微分。PID控制原理图 在西门...
西门子S7-200 SMART PID回路控制,如何配置PID向导、调用子程序?如何创建状态图表测试程序?如何自整定PID参数?
PID控制器是应用最广泛的闭环控制器,它根据给定值与被控变量实测值之间的偏差,按照PID算法计算出控制器的输出量控制执行机构进行调节,使被控量跟随给定量进行变化并使系统达到稳定,自动消除各种干扰对控制过程的影响,其中P、I、D分别指比例、积分、微分。PID控制原理图 在西门...

西门子S7-200 SMART自由口通信参数如何设置?如何编写发送程序和接收程序?如何测试?
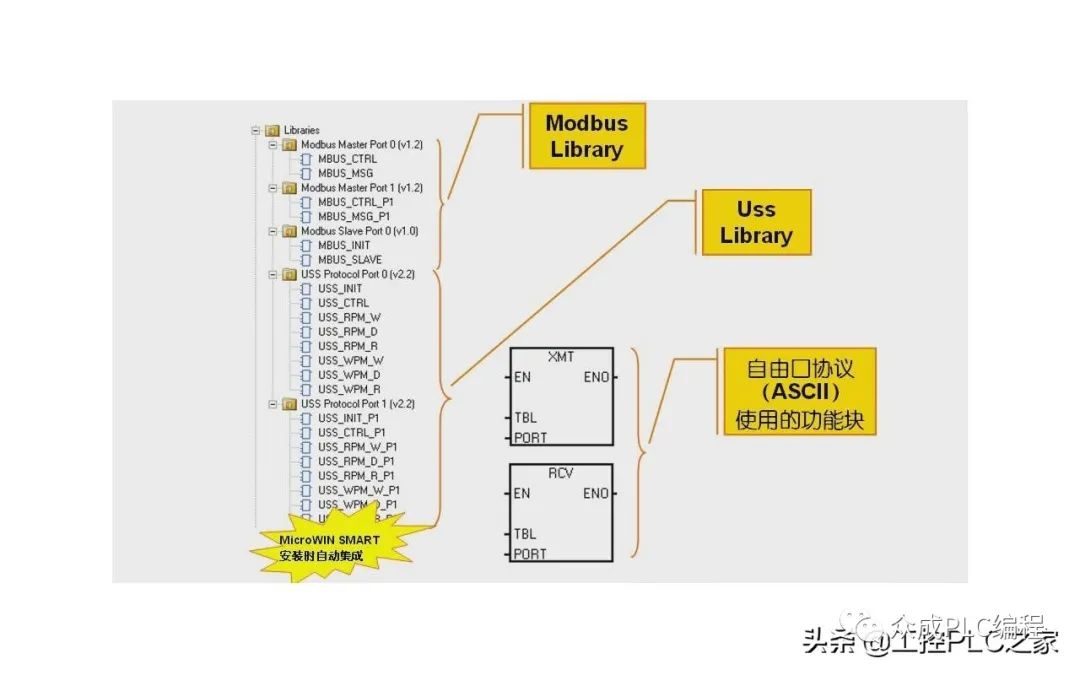
西门子S7-200 SMART除了支持以太网通信,还可以通过CPU上或信号板上的RS485接口实现串口通信。支持的串口协议,包括自由口协议、USS协议、MODBUS协议和PPI协议。STEP7 Micro/WIN SMART编程软件安装时自动集成串口通信所需要的功能块和子程序。串口通信所需的功能块和...
西门子S7-200 SMART自由口通信,如何编写发送程序,使用超级终端发送测试
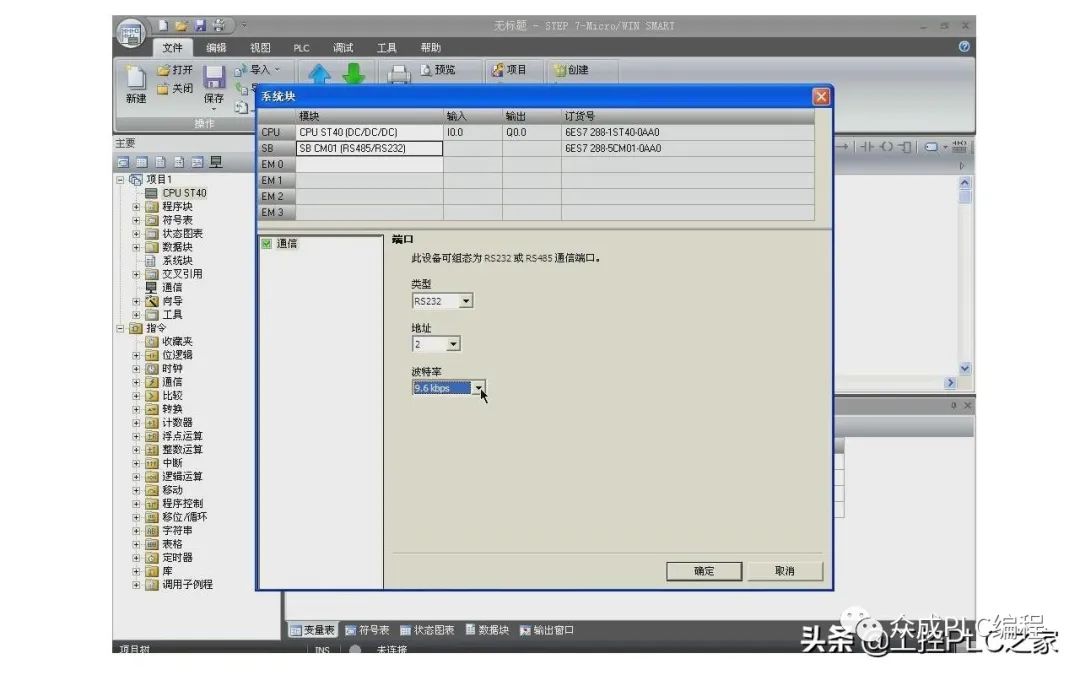
今天我们学习编写西门子S7-200 SMART自由口通信的发送程序,并使用超级终端进行发送功能测试。首先设置参数,打开STEP7 Micro/WIN SMART编程软件,右键单击项目树中的CPU,选择打开,在打开的系统块中选择CPU类型和信号板类型。设置信号板,串口的类型为RS232,地址为2&am...
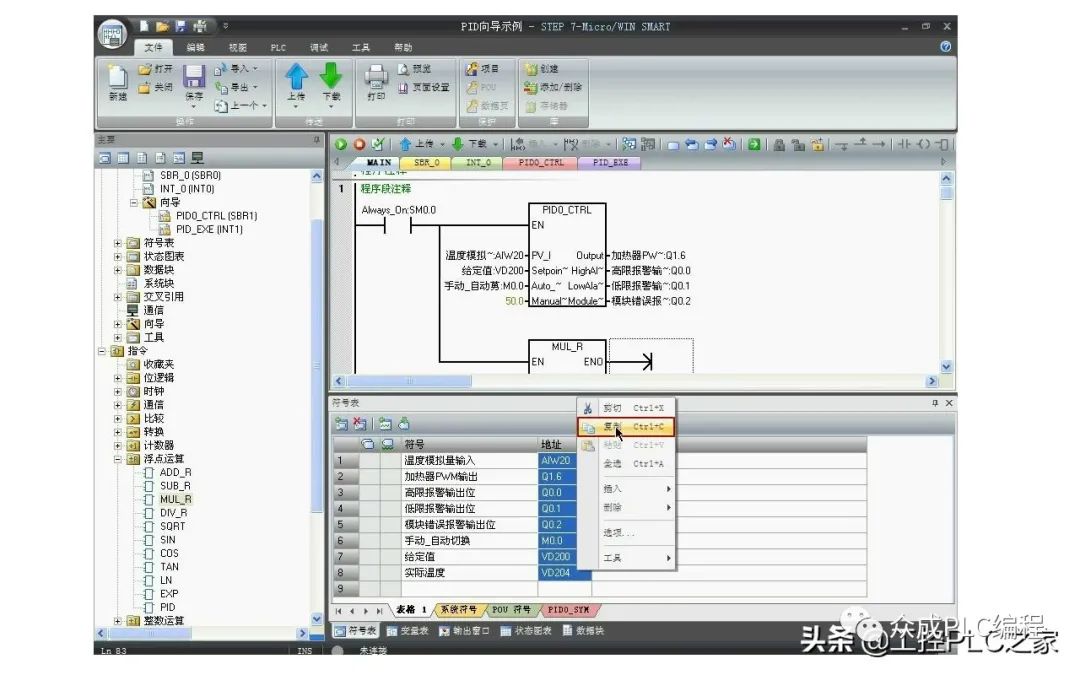
西门子S7-200 SMART PID回路控制,如何创建状态图表,下载并测试程序
上篇文章中我们学习了调用向导生成的子程序编程来实现西门子S7-200 SMART PID回路控制,今天我们来学习如何创建状态图表并利用状态图表来测试程序。首先我们来看一下如何创建状态图表。复制所需的数据地址 创建状态图表。从符号表复制所需要监控的数据地址粘贴到状态图表中,切...

西门子S7-200 SMART运动控制功能,运动轴组态,运动控制程序编写测试
今天我们来介绍一下西门子S7-200 SMART运动控制功能,下面我们先来学习如何使用向导组态运动轴。西门子S7-200 SMART CPU内置运动轴,可以实现速度和位置的开环运动控制。S7-200 SMART CPU输出脉冲和方向信号至伺服驱动器,伺服驱动器再将从CPU输入的给定值,经过处理后输出...

西门子S7-200 SMART运动控制功能,编写程序并测试,运动控制面板
上篇文章我们学习了如何使用向导组态运动轴,本篇我们来学习编写程序并测试以及如何使用运动控制面板。编写程序,首先将初始化速度送至相关存储区,再编写使能驱动程序,M2.0为1时使能驱动器,调用轴控制子程序,编写输入输出参数,输入端填写SM0.0,表示每个扫描周期都要使能该子程序。在下一程序...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
产品推荐

社区圈子



最佳实践




