深度学习论文阅读目标检测篇(七)中文版:YOLOv4《Optimal Speed and Accuracy of Object Detection》
Abstract 摘要 有大量的技巧可以提高卷积神经网络(CNN)的精度。需要在大 数据集下对这种技巧的组合进行实际测试,并需要对结果进行理论论 证。某些技巧仅在某些模型上使用和专门针对某些问题,或只针对小 规模的数据集;而一些技巧,如批处理归一化、残差连接等,适用于 大多数的模型、任务...
深度学习论文阅读目标检测篇(七)中英对照版:YOLOv4《Optimal Speed and Accuracy of Object Detection》
Abstract 摘要 There are a huge number of features which are said to improve Convolutional Neural Network (CNN) accuracy. Practical testing of comb...
深度学习论文阅读目标检测篇(四)中文版:YOLOv1《 You Only Look Once: Unified, Real-Time Object Detection》
摘要 我们提出了YOLO,一种新的目标检测方法。以前的目标检测工作重复利用分类器来完成检测任务。相反,我们将目标检测框架看作回归问题,从空间上分割边界框和相关的类别概率。单个神经网络在一次评估中直接从整个图像上预测边界框和类别概率。由于整个检测流水线是单一网络,因此可以直接对检测性能进行...
深度学习论文阅读目标检测篇(四)中英文对照版:YOLOv1《 You Only Look Once: Unified, Real-Time Object Detection》
Abstract 摘要 We present YOLO, a new approach to object detection. Prior work on object detection repurposes classifiers to perform detection. Ins...
深度学习论文阅读目标检测篇(三):Faster R-CNN《 Towards Real-Time Object Detection with Region Proposal Networks》
Abstract 摘要 State-of-the-art object detection networks depend on region proposal algorithms to hypothesize object locations. Advances like SPPne...
深度学习论文阅读目标检测篇(一):R-CNN《Rich feature hierarchies for accurate object detection and semantic...》
Abstract 摘要 Object detection performance, as measured on the canonical PASCAL VOC dataset, has plateaued in the last few years. The bestperformi...

【文章阅读】Frustratingly Simple Few-Shot Object Detection
简单的少镜头目标检测论文:https://arxiv.org/abs/2003.06957代码:https://github.com/ucbdrive/few-shot-object-detectionAbstractDetecting rare objects from a few exam...
Vue 2 阅读理解(十五)之响应式系统(一)Object.defineProperty
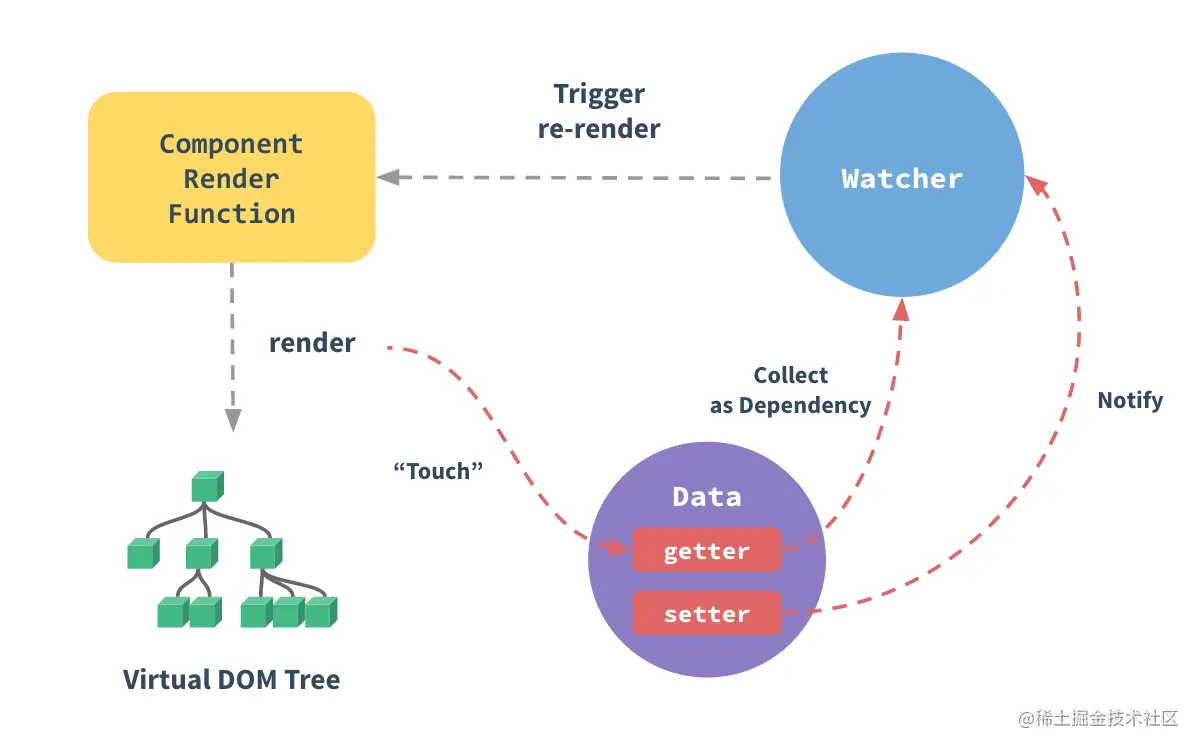
响应式系统(一)在 Vue 2 的官方文档 - 深入响应式原理 中介绍了 Vue 最独特的特性就是 非侵入性 的响应式系统,所有的数据模型都是对象形式。在 Vue 2 中,每个 Vue 实例都接收一个 对象形式 Options 来初始化,并通过 Object.defineProperty 来对象里面...
论文阅读:RRPN:RADAR REGION PROPOSAL NETWORK FOR OBJECT DETECTION IN AUTONOMOUS VEHICLES
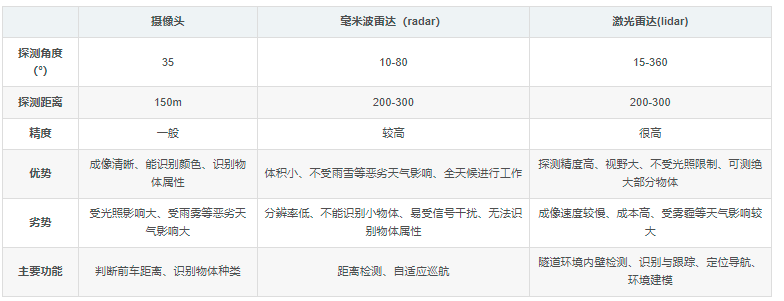
写在前面 在上篇文章中,我们学习到了激光雷达和相机融合的论文。那么这篇文章我将来介绍一下毫米波雷达和相机融合的方法。这里我先给出三种传感器(相机、激光雷达、毫米波雷达)的一些属性特点,如下: radar可以在检测到的物体上提供准确的距离和速率信息,但它们不适用于诸如物体分类之类的任务,因为它不能...
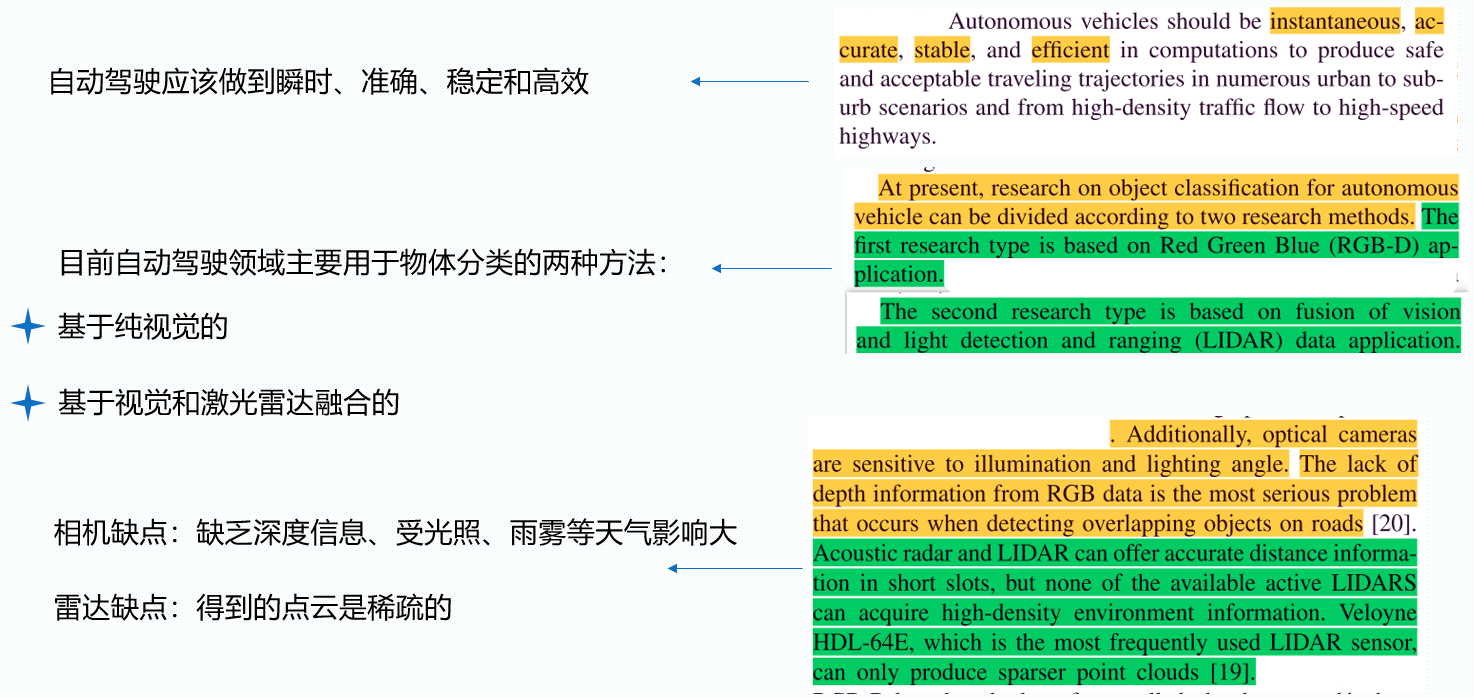
论文阅读:Object Classification Using CNN-Based Fusion of Vision and LIDAR in Autonomous Vehicle
前言先来看看题目的中文解释叭,即在自动驾驶环境中使用CNN-Based融合视觉和激光雷达进行物体分类。我们常见的物体分类算法大多是纯视觉的,那么今天我分享的文章呢,是融合了视觉和激光雷达传感器进行物体分类。写此文章也是最近刚好一门课上要求阅读两篇论文进行讲解,恰巧遇此活动,于是在此记录下来📝📝&...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
object您可能感兴趣
- object类
- object string
- object对象
- object instanceof
- object宏
- object cannot
- object navigation
- object language
- object found
- object arch
- object数组
- object数据类型
- object解析
- object int
- object directory
- object笔记
- object语言
- object功能
- object property
- object变量
- object面向对象
- object float
- object xml
- object serializable
- object default