3D激光SLAM:ALOAM:激光雷达的运动畸变补偿代码解析
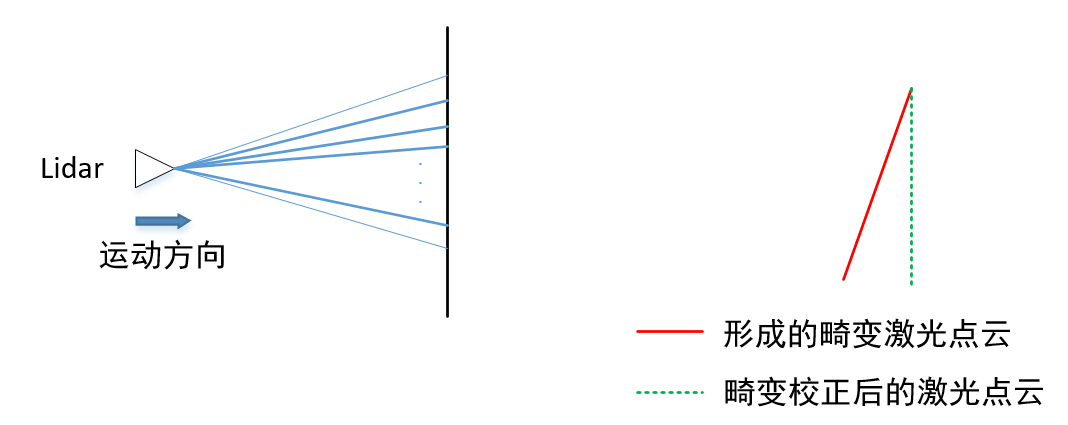
前言什么是激光雷达的运动畸变 ?激光雷达的一帧数据是过去一周期内形成的所有数据,数据仅有一时间戳,而非某个时刻的数据,因此在这一帧时间内的激光雷达或者其载体通常会发生运动,因此,这一帧的原点不一致,会导致一些问题,这个问题就是运动畸变所以需要去运动畸变,也叫畸变校正如何进行运动补偿?运动补偿的目的就...
3D激光SLAM:ALOAM:异常点剔除机制代码解析
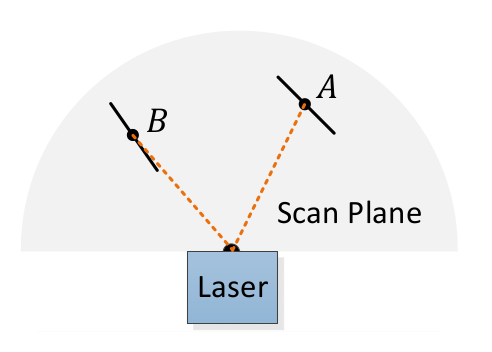
@TOC前言在LOAM的论文中,作者提到了要剔除两种异常点.平行点遮挡点但是在ALOAM的代码中并未写相关的功能.如果想把论文中两种异常点的剔除机制加进去,可以参考下面的代码.之前把一些其它的异常点剔除的方法总结了,可以参考这个地方去除掉非常近的点去除掉非常远的点去除NaN的点反射率处理去除入射角较...

SLAM算法解析:抓住视觉SLAM难点,了解技术发展大趋势
SLAM(Simultaneous Localization and Mapping) 是业界公认视觉领域空间定位技术的前沿方向,中文译名为「同步定位与地图构建」,它主要用于解决机器人在未知环境运动时的定位和地图构建问题。本次阅面科技资深研究员赵季也将从 SLAM 方向着手,为大家展现更深层次的技术...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。