改进的yolov5目标检测-yolov5替换骨干网络-yolo剪枝(TensorRT及NCNN部署)-2
改进的yolov5目标检测-yolov5替换骨干网络-yolo剪枝(TensorRT及NCNN部署)-1 https://developer.aliyun.com/article/1446504?spm=a2c6h.13148508.setting.30.68a34f0e3ZrSNI C、Mobil...

改进的yolov5目标检测-yolov5替换骨干网络-yolo剪枝(TensorRT及NCNN部署)-1
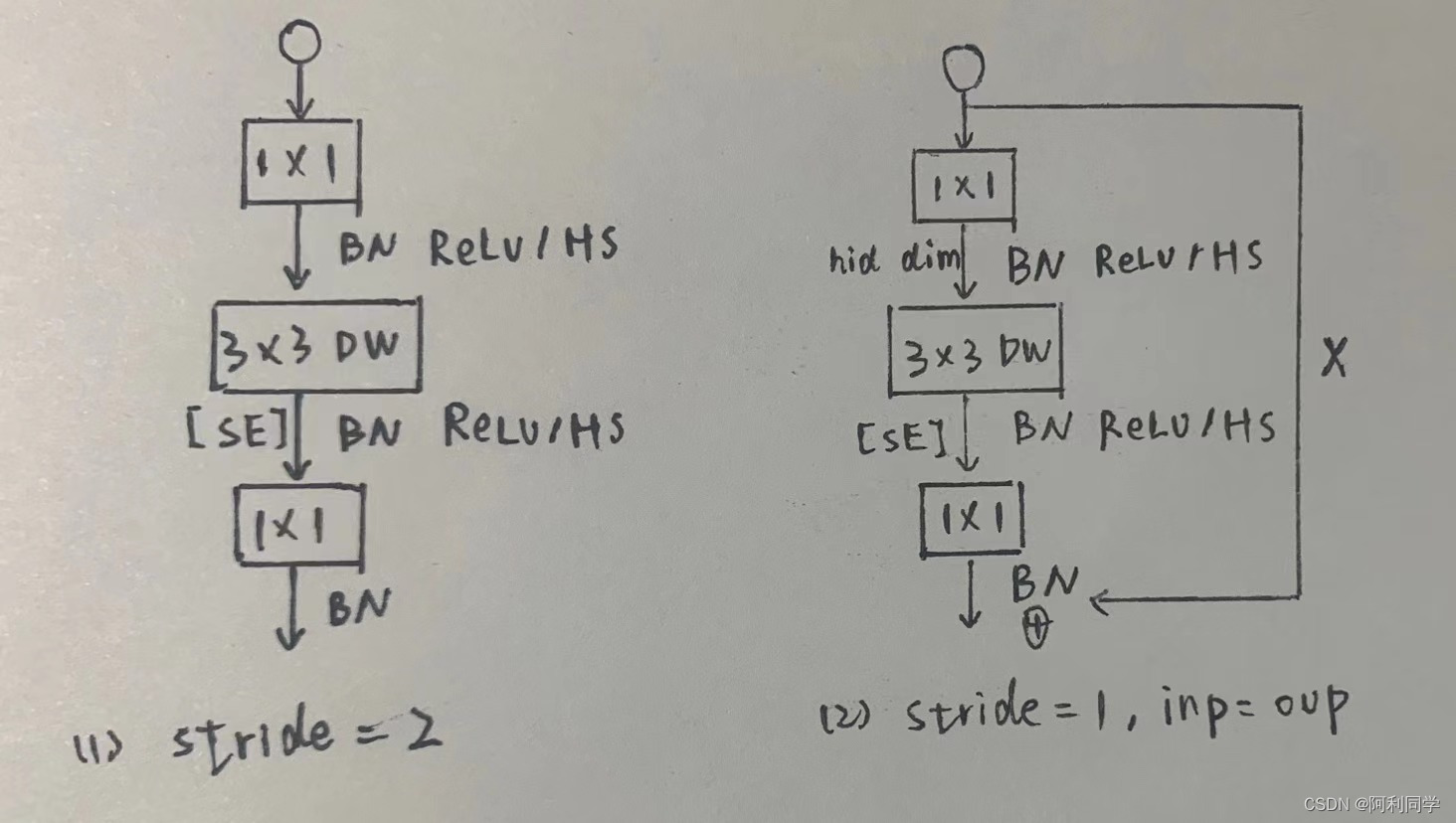
YOLOv5改进点 2022.10.30 复现TPH-YOLOv5 2022.10.31 完成替换backbone为Ghostnet 2022.11.02 完成替换backbone为Shuff...

CV目标检测 Task02: 练死劲儿-网络设计 打卡笔记
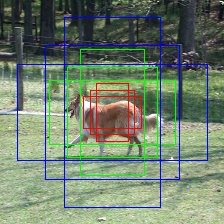
蓝色部分为记录的笔记由于目标检测网络原理的复杂性,在正式的跑训练脚本愉快炼丹前,还有很多枯燥的概念需要学习。塔们说,这是练死劲儿,不好用,我说这个好用,这叫基本功,炼丹师讲究的就是基本功。因此在task2中,我们需要学习两块原理性的内容:锚框 和 目标检测的网络结构设计分别对应《动手学CV-Pyto...
【论文速递】CVPR2022-弱监督旋转不变的航空目标检测网络
【论文原文】:超网络体系下的目标优选模型获取地址:https://kns.cnki.net/kcms2/article/abstract?v=3uoqIhG8C45S0n9fL2suRadTyEVl2pW9UrhTDCdPD65GA12tdKgW-bKuGOqLNnh5eAZmICm_nEqVchm...
【论文速递】CVPR2022-弱监督旋转不变的航空目标检测网络
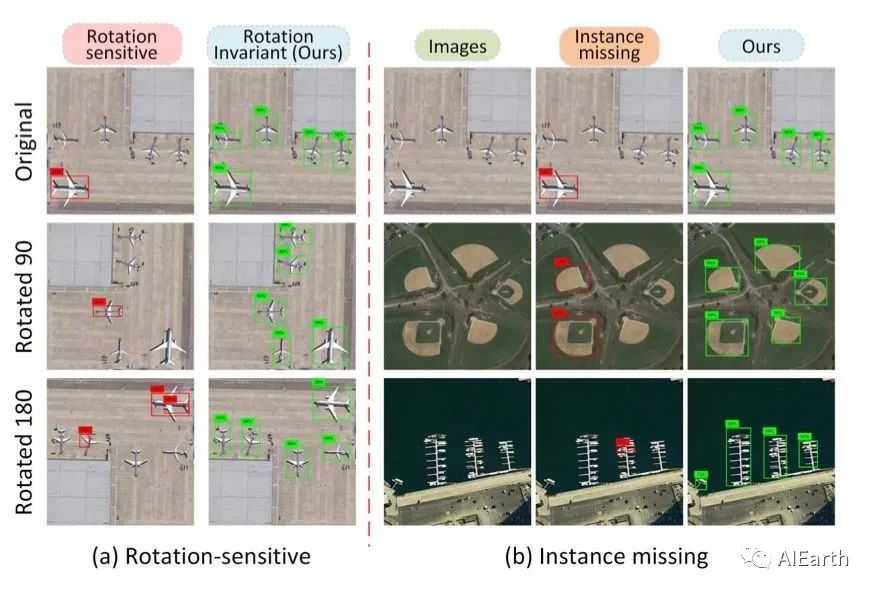
【论文原文】:Weakly Supervised Rotation-Invariant Aerial Object Detection Network获取地址:https://ieeexplore.ieee.org/document/9880297博主关键词: 目标检测,弱监督学习摘要:弱监督航空目...
【论文解读】MV3D-Net 用于自动驾驶的多视图3D目标检测网络
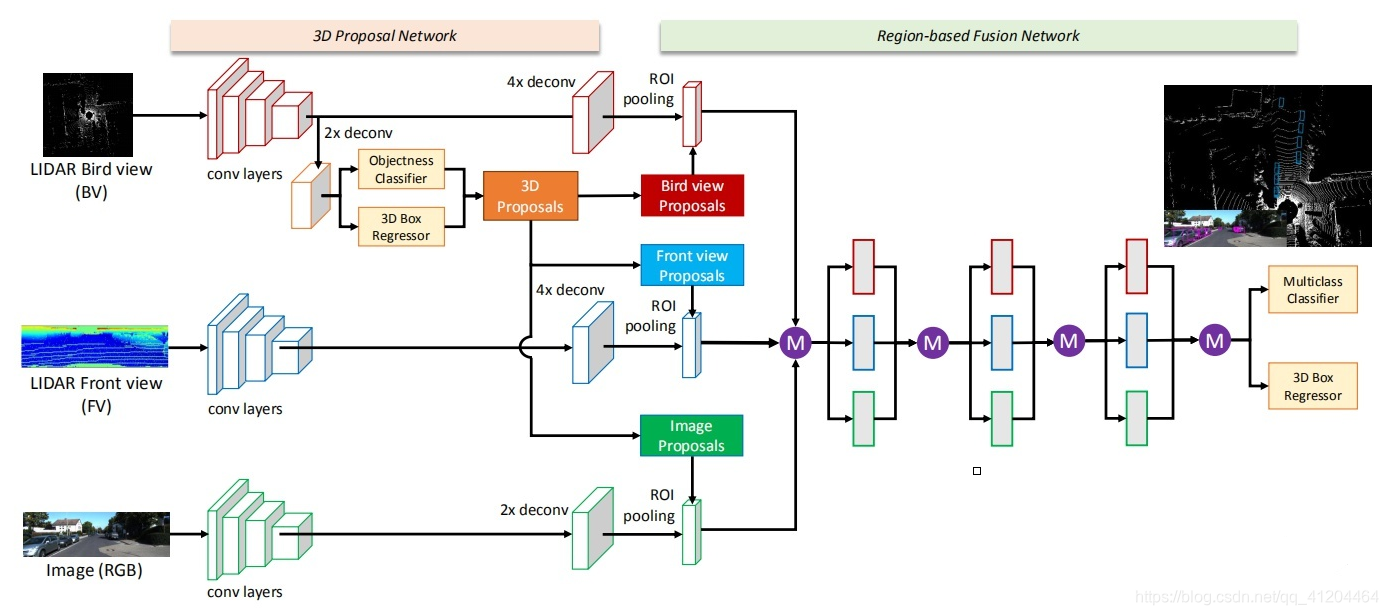
一、框架了解先看下总体网络结构:(可以点击图片放大查看)上图中的紫色圆圈中M是表示 :基于元素的均值。输入的数据:有三种,分别是点云俯视图、点云前视图和二维RGB图像。“点云投影”,其实并非简单地把三维压成二维,而是提取了高程、密度、光强等特征,分别作为像素值ÿ...
达摩院OpenVI-目标检测- 针对流感知的长短支路网络 LongShortNet
01论文&代码论文 https://arxiv.org/abs/2210.15518代码&应用开源代码:https://github.com/LiChenyang-Github/LongShortNet开源应用:02背景传统视频目标检测(Video Object&...
【达摩院OpenVI—通用检测系列之视频目标检测】(ICASSP 2023) 针对流感知的长短支路网络 LongShortNet
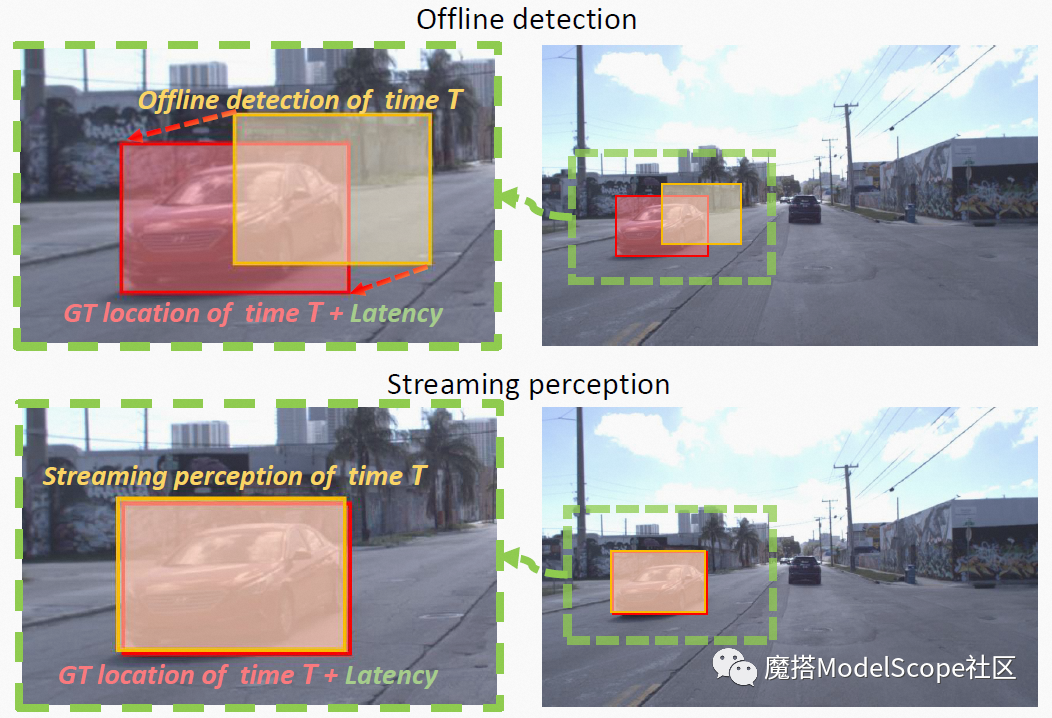
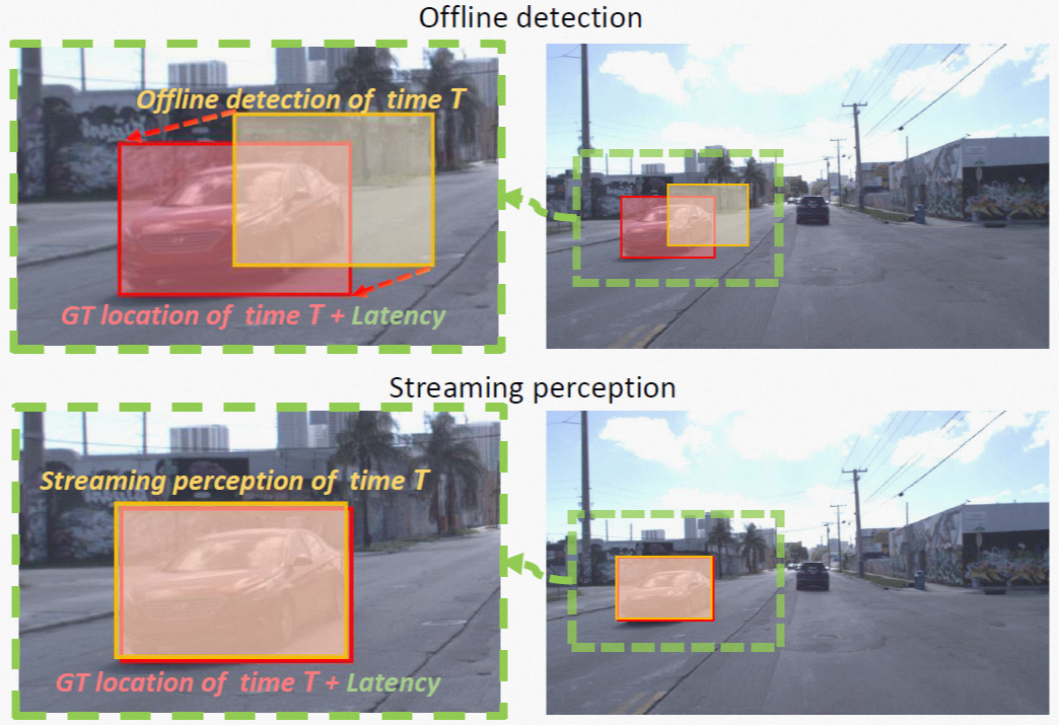
一、背景介绍 传统视频目标检测(Video Object Detection, VOD)任务以一段视频作为输入,利用视频的时序信息进行目标检测,并最终输出每一帧视频帧的检测结果。其相比图像目标检测(Image Object Detection, IOD)任务,优势在于能够利用视频的时序信...
涨点技巧 | 旷视孙剑等人提出i-FPN:用于目标检测的隐式特征金字塔网络(文末获取论文)(二)
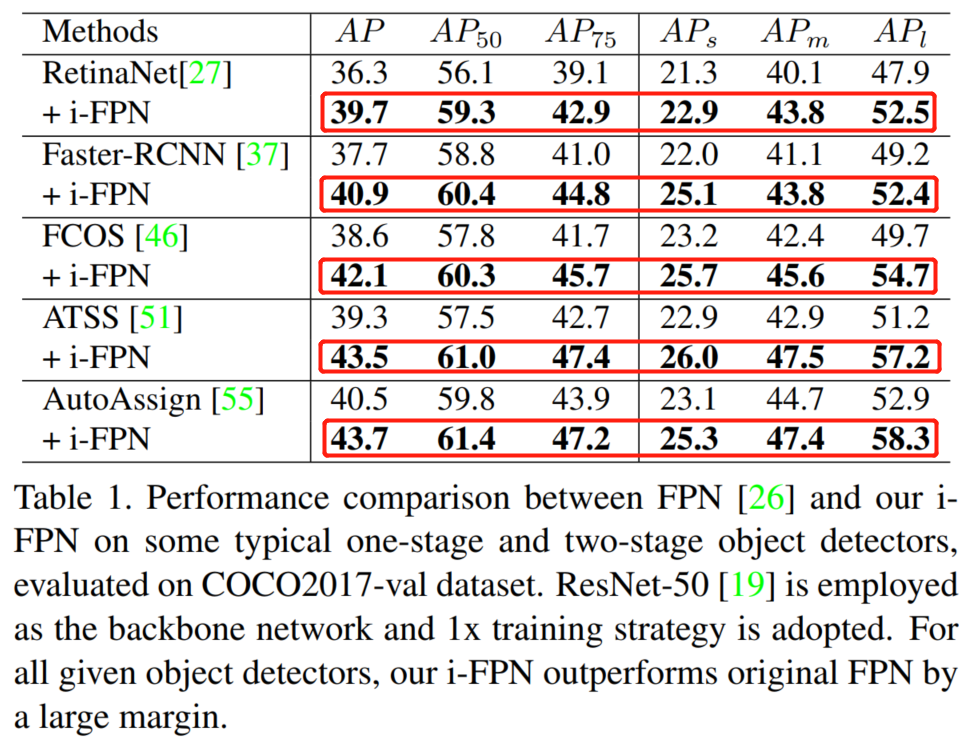
4 实验4.1 MS COCO 2017实验结果i-FPN的表现远远优于原始FPN。i-FPN提高了平均AP +3.4(RetinaNet)、+3.2(Faster RCNN)、+3.5(FCOS)、+4.2(ATSS)、+3.2(AutoAssign)。下图为在COCO2017-val数据集的几个...
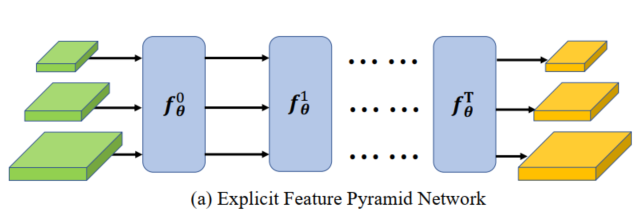
涨点技巧 | 旷视孙剑等人提出i-FPN:用于目标检测的隐式特征金字塔网络(文末获取论文)(一)
1 简介我们都知道一个典型的基于卷积神经网络的目标检测器主要由3个部分组成:Backbone、Neck和Head;主干部分(如VGG、ResNet或EfficientNet等)主要是从输入图像中提取基本特征,这些Backbone模型通常都会事先在ImageNet上进行预训练。Neck主要是用来产生H...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
产品推荐

社区圈子




最佳实践




