【Simulink】基于FCS-MPC的单相并网逆变器电流控制(Matlab Function)
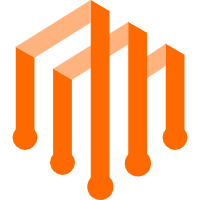
之前写过【Simulink】基于FCS-MPC的三相并网逆变器电流控制(Matlab Function)以及【Simulink】基于FCS-MPC的三相并网逆变器电流控制(Stateflow),控制对象都是三相逆变器,本篇博客将研究单相逆变器。1. 单相并网逆变器拓扑在单相逆变器中,当开关管S1和S...
【Simulink】示波器图形数据导入Matlab重新绘图的简明教程(论文)
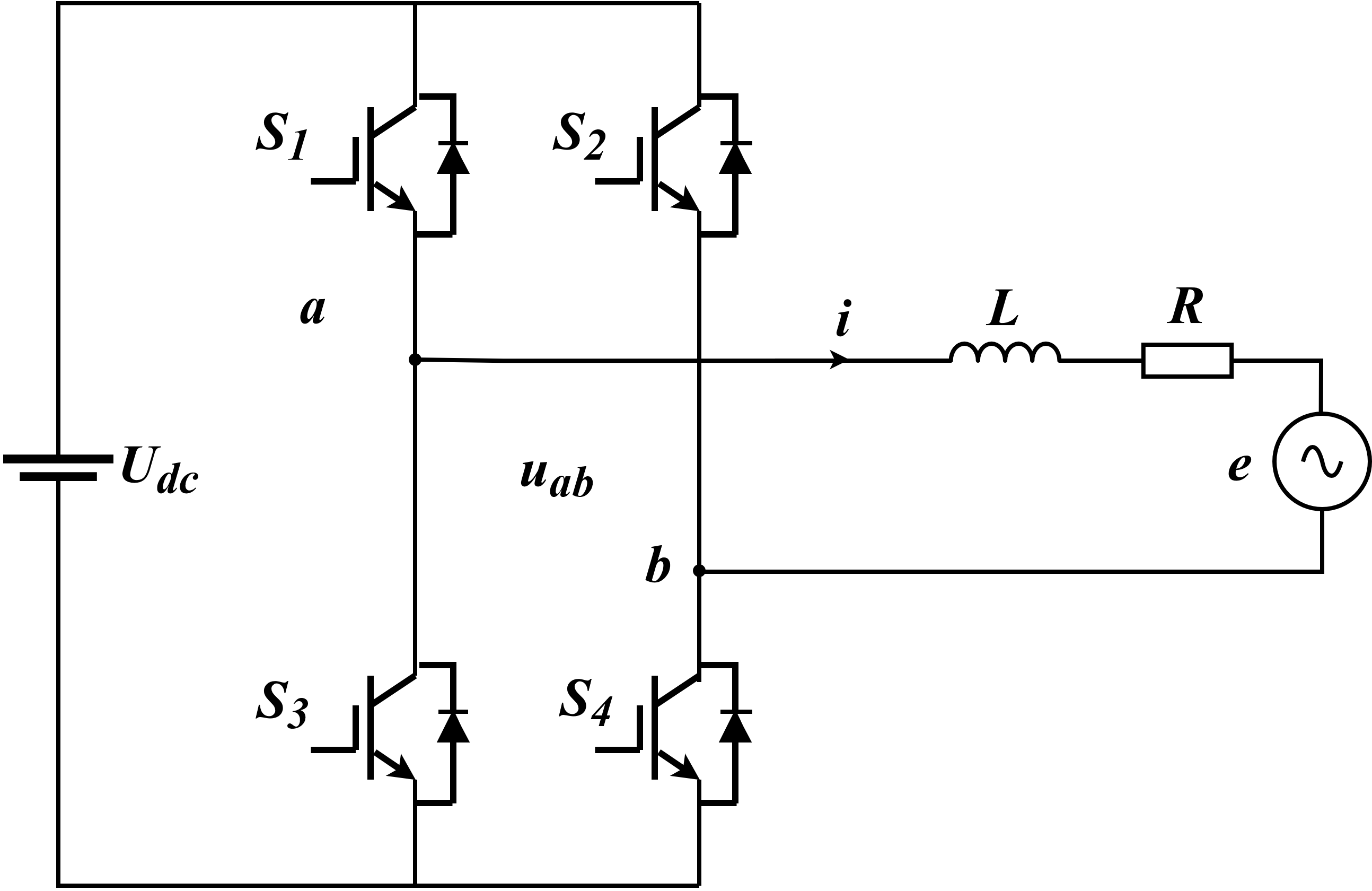
版本:Matlab2019b1. 效果示波器波形图片:黑色背景,而且坐标轴字体较小,不方便修改,不能直接用在论文上面对比 Matlab 绘图:接下来介绍如何设置~2. Simulink 设置波形数据导出选择需要导入的示波器数据点击 View > Configuration Properties...
【Simulink】基于FCS-MPC的三相并网逆变器电流控制(Matlab Function)
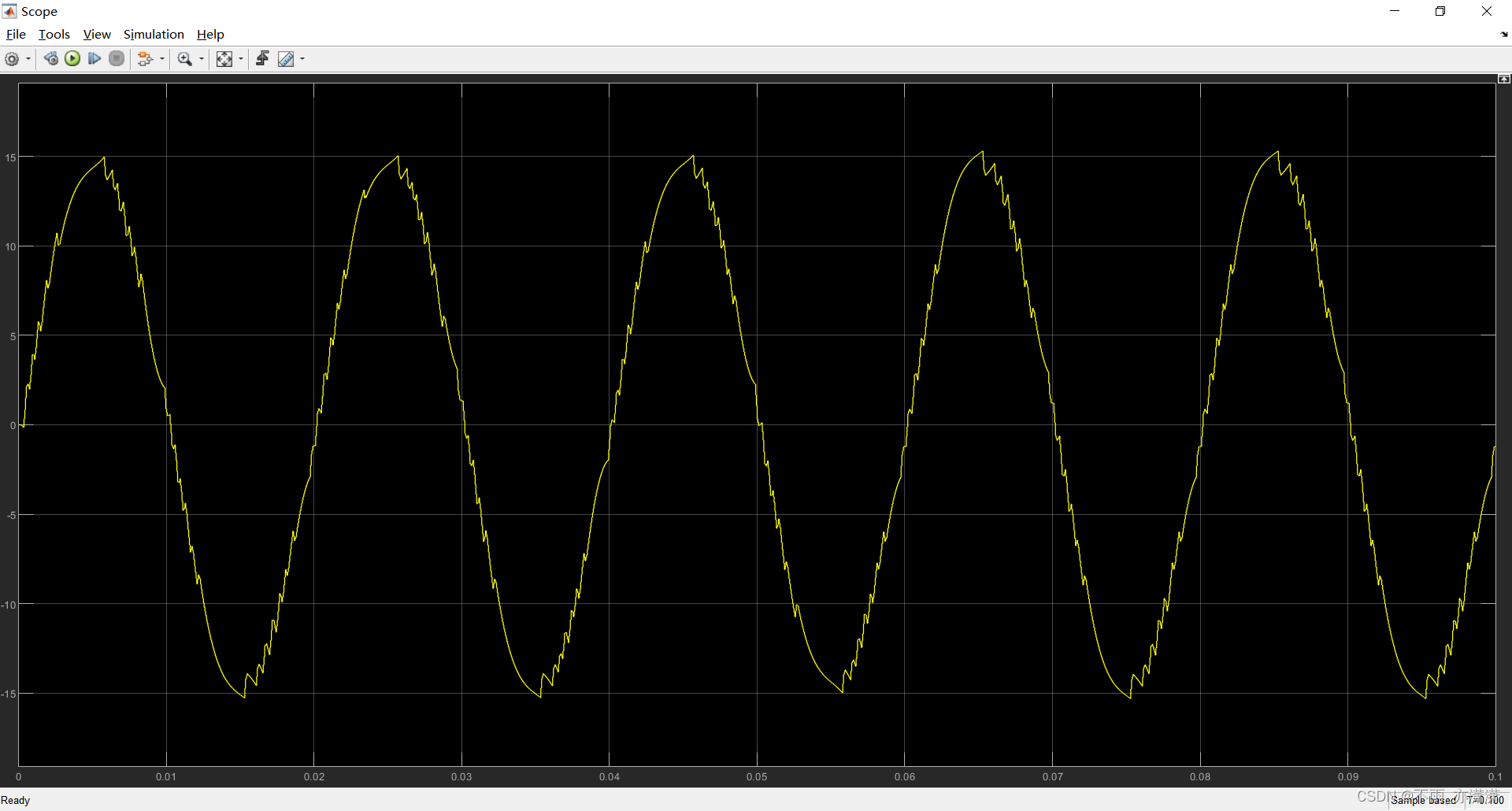
最近在学 MPC(模型预测控制) ,看到b站一个视频讲解得挺好的:MPC专题(一)_基于模型预测的并网变流器控制策略本篇博客将参考视频给出Simulink仿真过程。1.模型预测控制Model Predictive Control (MPC)概念:通过模型来预测系统在未来几个周期内的全部状态(有限个)...
Matlab Simulink支持system generator插件
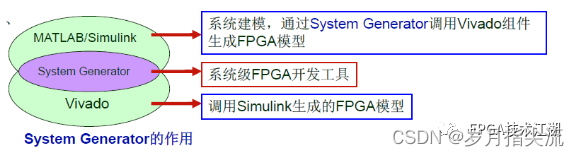
前言目前有在 Simulink 中开发完成后将其转换成 Verilog 语言并将其跑在 fpga 上面的需求,因此本文简要介绍了在 matlab 的 simulink 中使用 system generator 的方法。一、System Generator 简介System Generator 是 X...
具有吸引子的非线性系统(Matlab&Simulink实现)
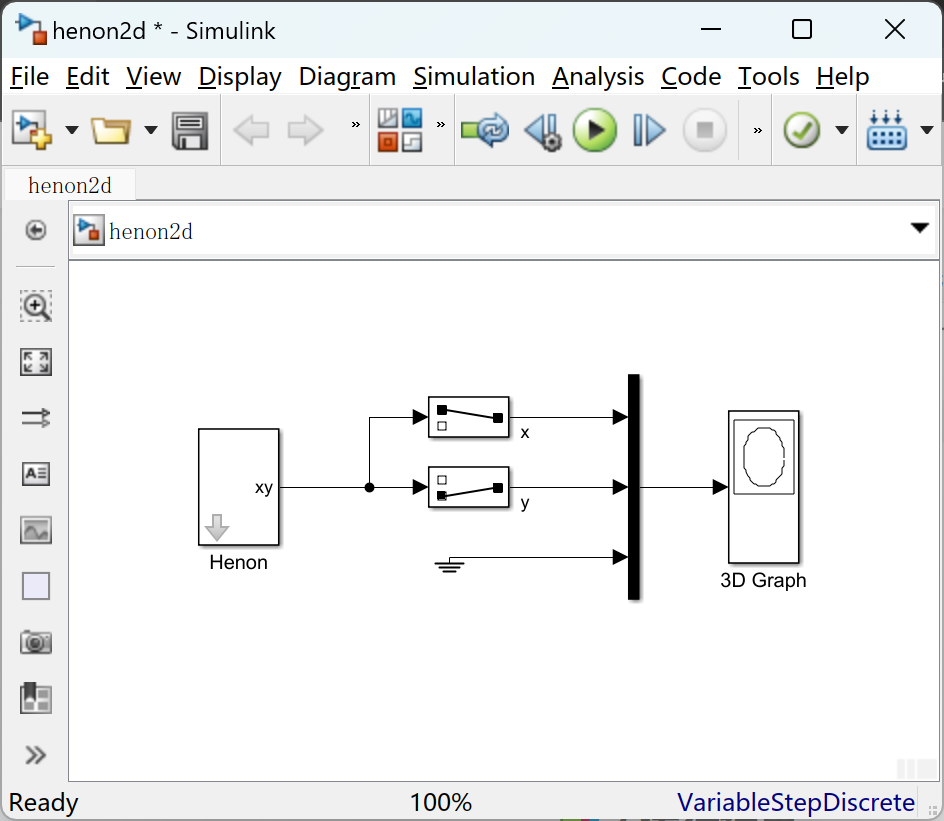
💥1 概述要在Simulink中实现具有吸引子的非线性系统,可以按照以下步骤进行操作:1. 打开Simulink并创建一个新的模型。2. 在模型中添加非线性系统的表示。可以使用Math Function块、Lookup Table块或者自定义的S函数来表示非线性系统的动态行为。根据你所建模的具体系...
用于永磁同步电机驱动器的自适应SDRE非线性无传感器速度控制(Matlab&Simulink实现)
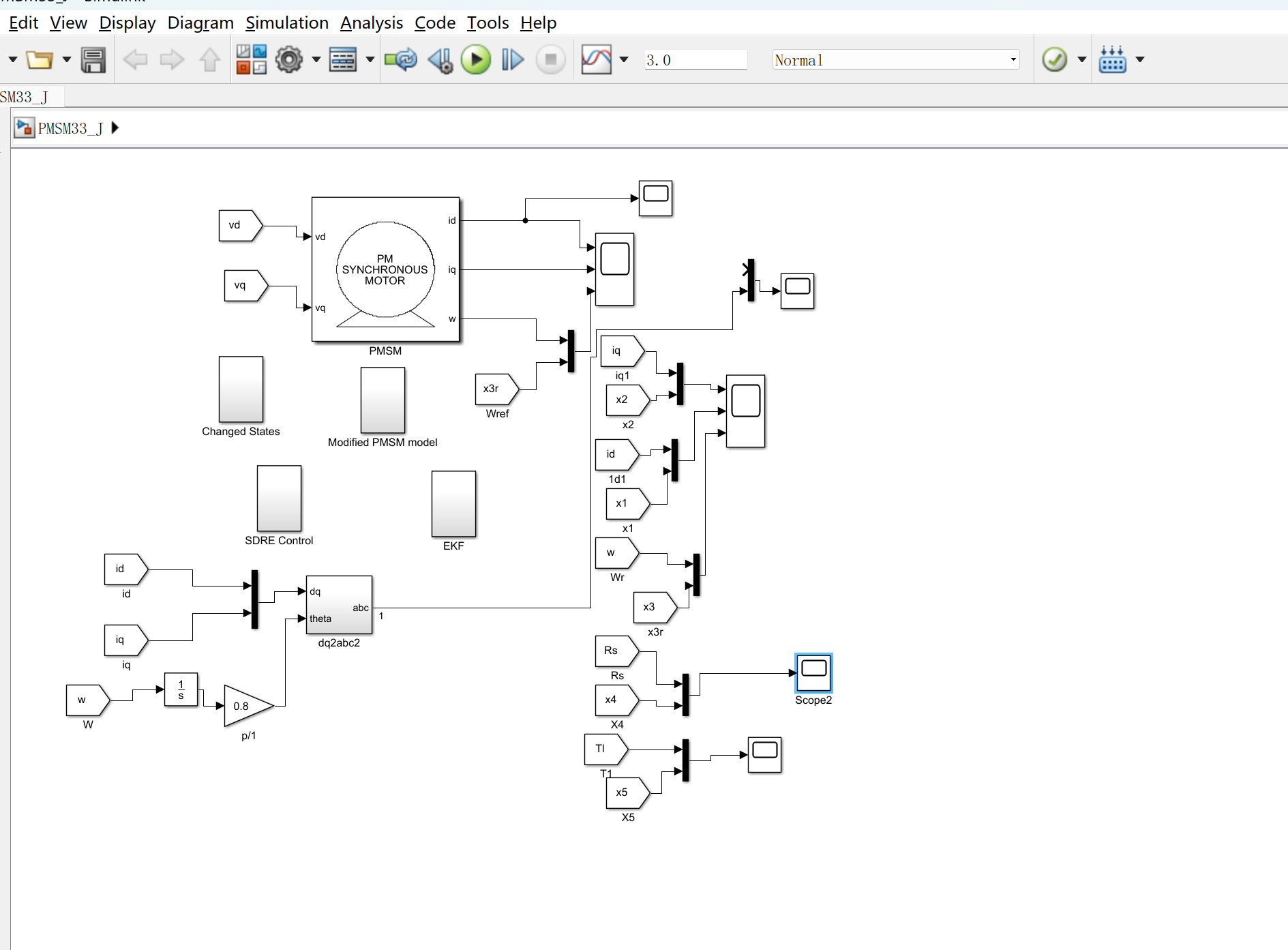
💥1 概述本文方法基于状态依赖的里卡蒂方程(SDRE)控制技术及其梯度型神经网络的实时计算方法,允许在线控制PMSM。为了实现用于永磁同步电机驱动器的自适应 SDRE(State-Dependent Riccati Equation)非线性无传感器速度控制,按照以下步骤进行。1. 确定系统的动态模...
具有电动驱动的四足机器人模型研究(Simulink&Matlab代码)
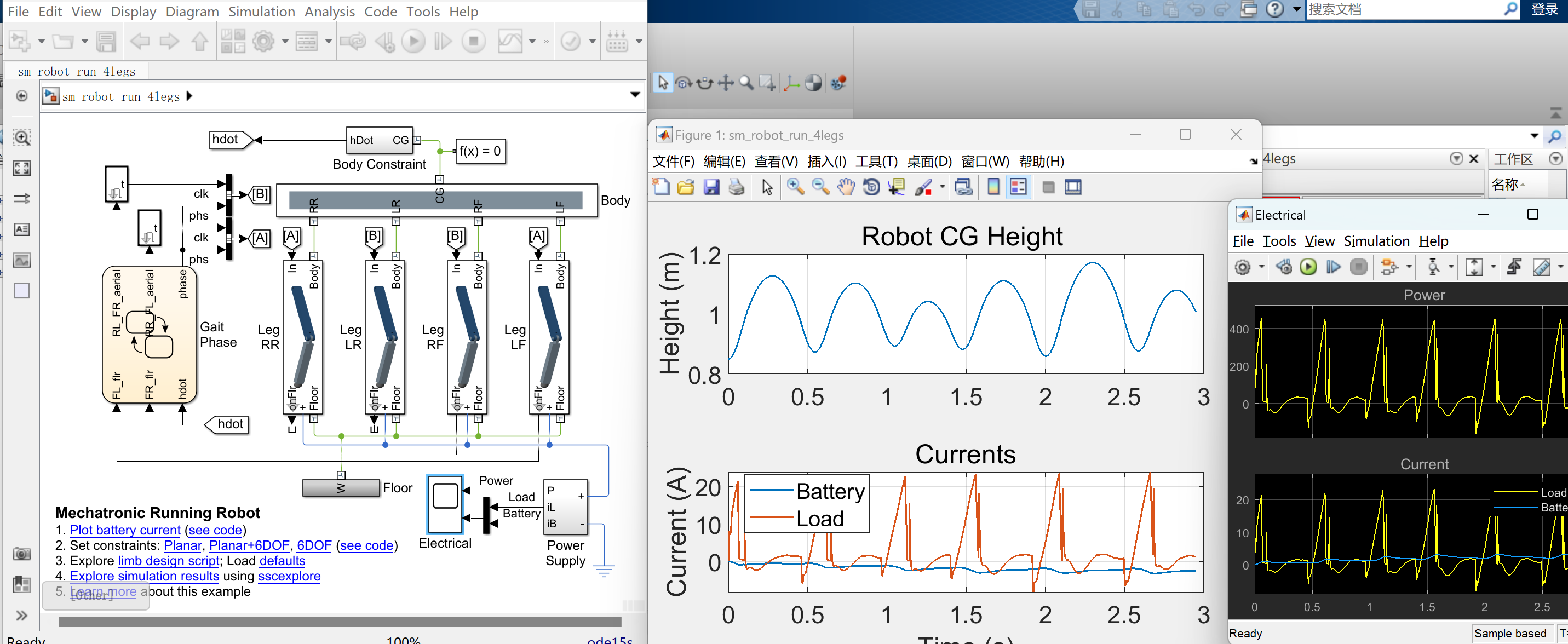
💥1 概述对具有电动驱动的四足机器人进行建模可以涉及以下几个方面:1.机械结构建模:对机器人的身体结构进行建模,包括身体的形状、大小和连接方式等。可以使用CAD软件进行三维建模,或者使用刚体模型进行简化建模。2.运动学建模:根据机器人的身体结构和关节连接方式,建立运动学模型,描述机器...
移动机器人和UGV的自主导航(Matlab代码&Simulink)
💥1 概述本文包含用于开发移动机器人和无人地面车辆 (UGV) 的自主导航软件堆栈的 MATLAB® 和 Simulink® 示例。本提交中包含的示例演示了如何与支持 ROS 的机器人和等效模拟进行交互,以设计和测试用于 Turtlebot3 自主导航的软件堆栈。📚2 运行结果plot(wayp...
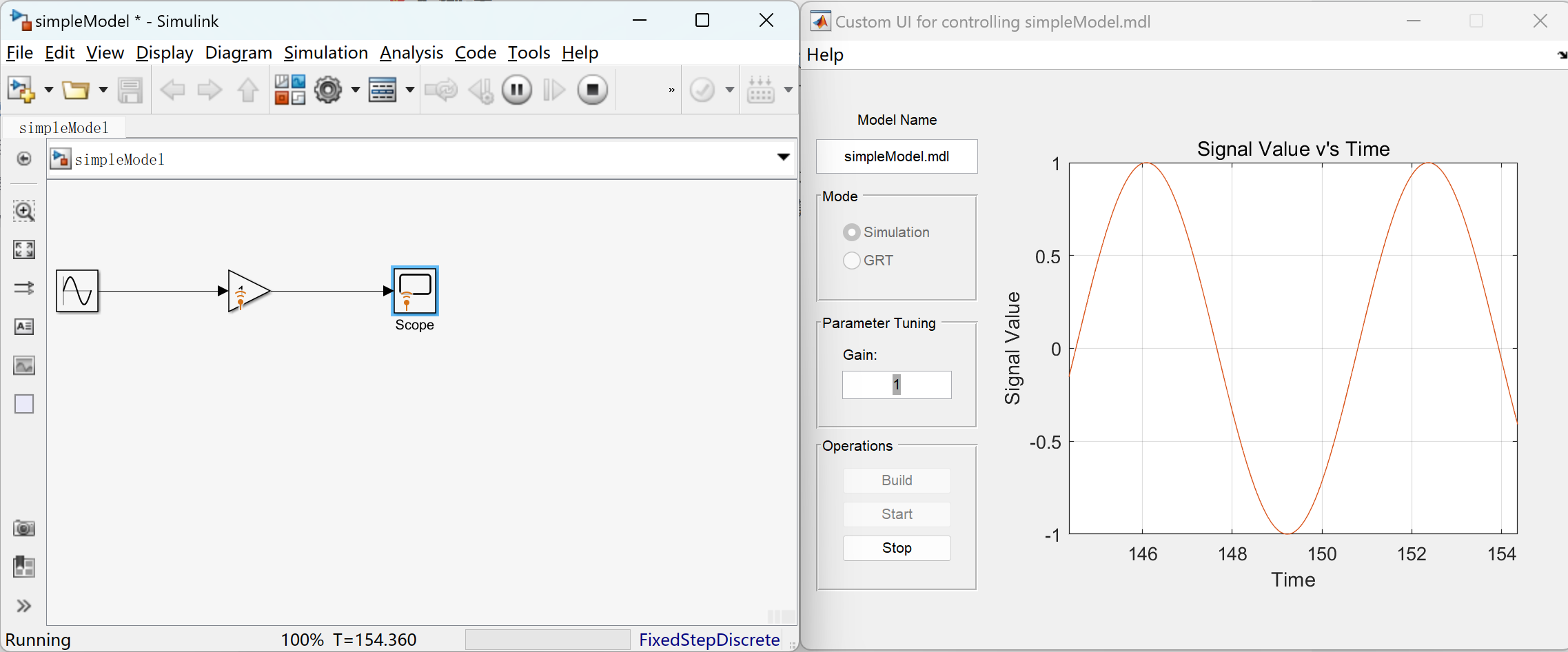
使用事件侦听器和 MATLAB GUI 查看 Simulink 信号研究
💥1 概述该模型可以作为标准仿真执行,也可以在构建到通用实时目标后执行(适用于具有 RTW 许可证的用户)。在后一种情况下,RTW 的外部模式和 TCP/IP 用于将数据从正在运行的可执行文件传输到模型,然后再传输到 UI。使用侦听器来查看信号而不是编写自定义 S 功能块的传统方法至少具有 2 个...
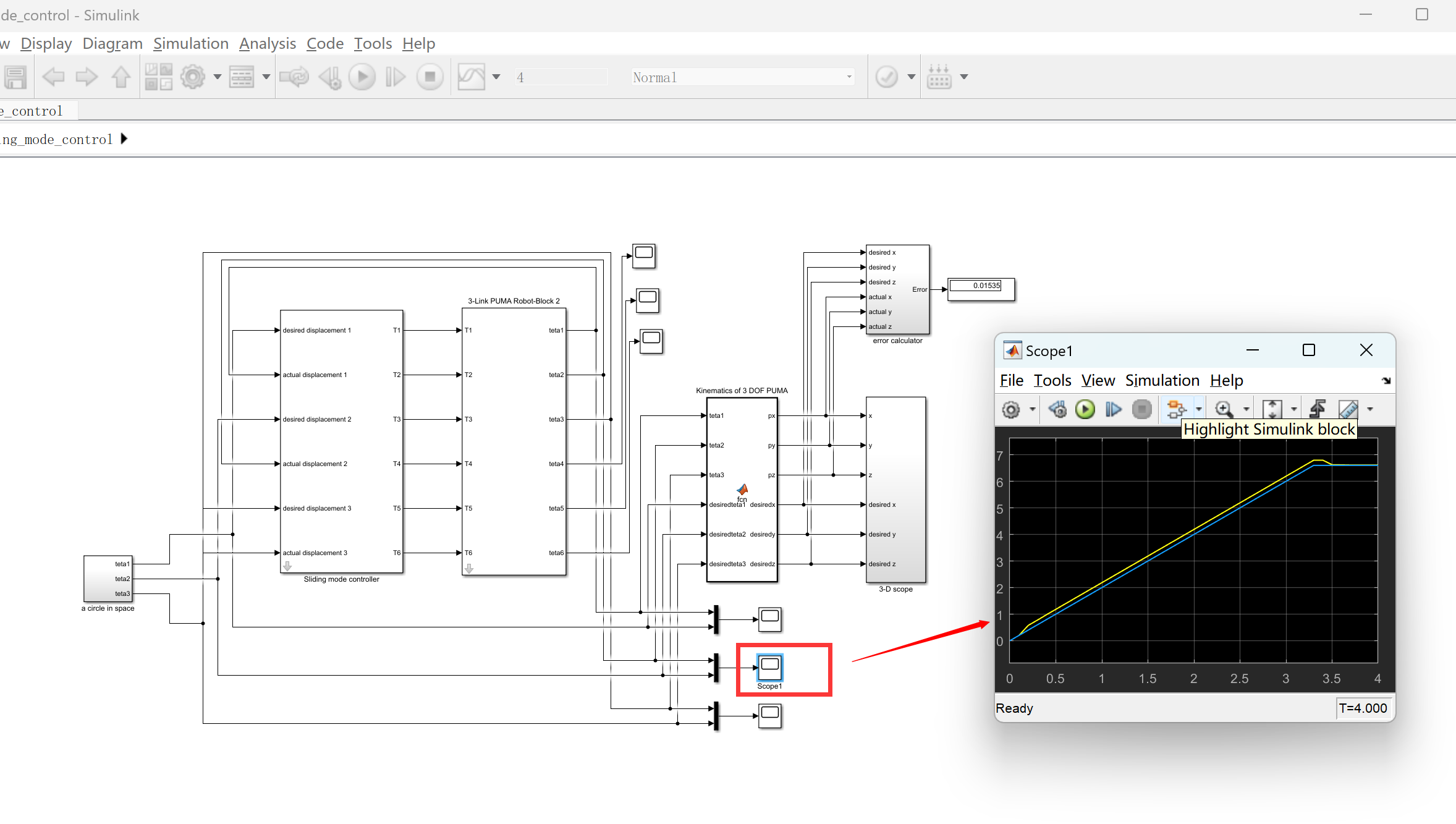
三自由度PUMA机器人非线性控制研究(Matlab代码、Simulink仿真实现)
💥1 概述针对三自由度PUMA560机器人的控制问题,可以使用三种不同的非线性控制算法:计算扭矩控制、滑模控制和反步控制。下面简要介绍这些算法的基本原理:1. 计算扭矩控制(Computed Torque Control):计算扭矩控制是一种基于模型的控制方法,通过反馈线性化将非线性...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。