[帮助文档] 如何使用聚类标注功能
功能介绍智能对话机器人上线使用过程中发生的机器人与用户间“错误交互”,可通过完成机器人与用户间的“问答标注”进行优化,从而可提升机器人回答准确率,进而可优化用户体验。错误交互问答标注”当前支持两种类型的“问答标注”:聚类标注和任务标注。聚类标注是指:系统会对近三个月的用户会话日志中,机器人回复澄清答...
[帮助文档] 多轮对话新画布功能概述
基本概念多轮对话可理解为是根据上下文内容,进行连续的,以达到解决某一类特定任务为目的的对话。也即是说,无法在用户与机器人的一次问答中完全达到对话目的,则可理解为多轮对话。具体示例如下图所示:说明在多轮对话示例中,用户可直接询问今天杭州天气,此时机器人可直接进行杭州天气回复,但由于并非所有用户都会在询...
[帮助文档] 什么是任务标注功能,如何使用
功能概述智能对话机器人上线使用过程中发生的机器人与用户间“错误交互”,可通过完成机器人与用户间的“问答标注”进行优化,从而可提升机器人回答准确率,进而可优化用户体验。当前支持两种类型的“问答标注”:聚类标注和任务标注。任务标注是指以任务的形式进行数据标注。错误交互问答标注”聚类标注任务标注说明错误交...
[帮助文档] 如何对只能机器人多轮对话新画布功能效果测试
功能概述一般地,在对话流建立完成后,正式上线运用前,需要对对话流进行测试,以保证对话流可被机器人正常使用。此外,通过对对话流的测试还能检测机器人多轮对话效果,为提升用户与机器人问答交互体验提供窗口。功能入口进入智能对话机器人主界面后,选择机器人中心>多轮对话,进入多轮对话主界面;机器人中心多轮...
[帮助文档] 什么是表格问答的全局设置,有哪些功能
功能概述表格问答的全局设置,是用于对指定表格的整体识别与回复效果进行干预,具体包括“表格定位、回复模板、回复替换、多轮对话配置、环境变量、展示类型和识别规则”七项内容的设置,具体功能描述如下表所示:指定表格整体识别回复效果全局设置内容功能描述表格定位通过配置具体问法或LGF规则,帮助机器人快速定位到...
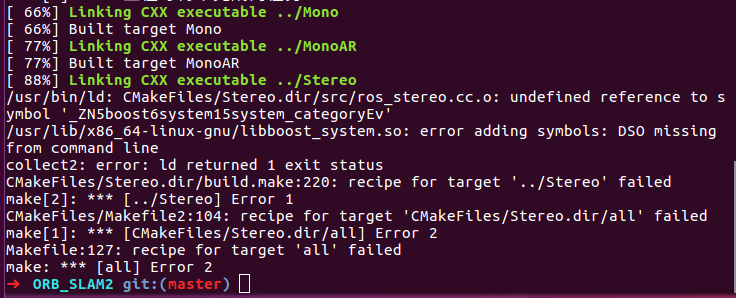
ROS中阶笔记(七):机器人SLAM与自主导航—SLAM功能包的使用(下)
2.2.4 启动hector_slam演示分别开启三个终端运行以下命令:$ roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch # 动一个gazebo仿真节点 $ roslaunch mbot_navigation hector_demo.launc...
ROS中阶笔记(七):机器人SLAM与自主导航—SLAM功能包的使用(上)
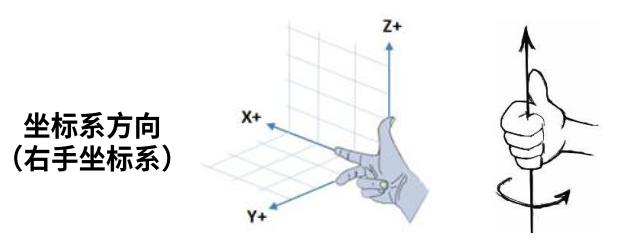
1 机器人必备条件1.1 硬件要求(1)差分轮式机器人,可使用twist速度指令控制$ rosmsg show geometry_msgs/Twist geometry_msgs/Vector3 linear # linear:xyz方向上的线速度,单位是m/s; float64 x float64...
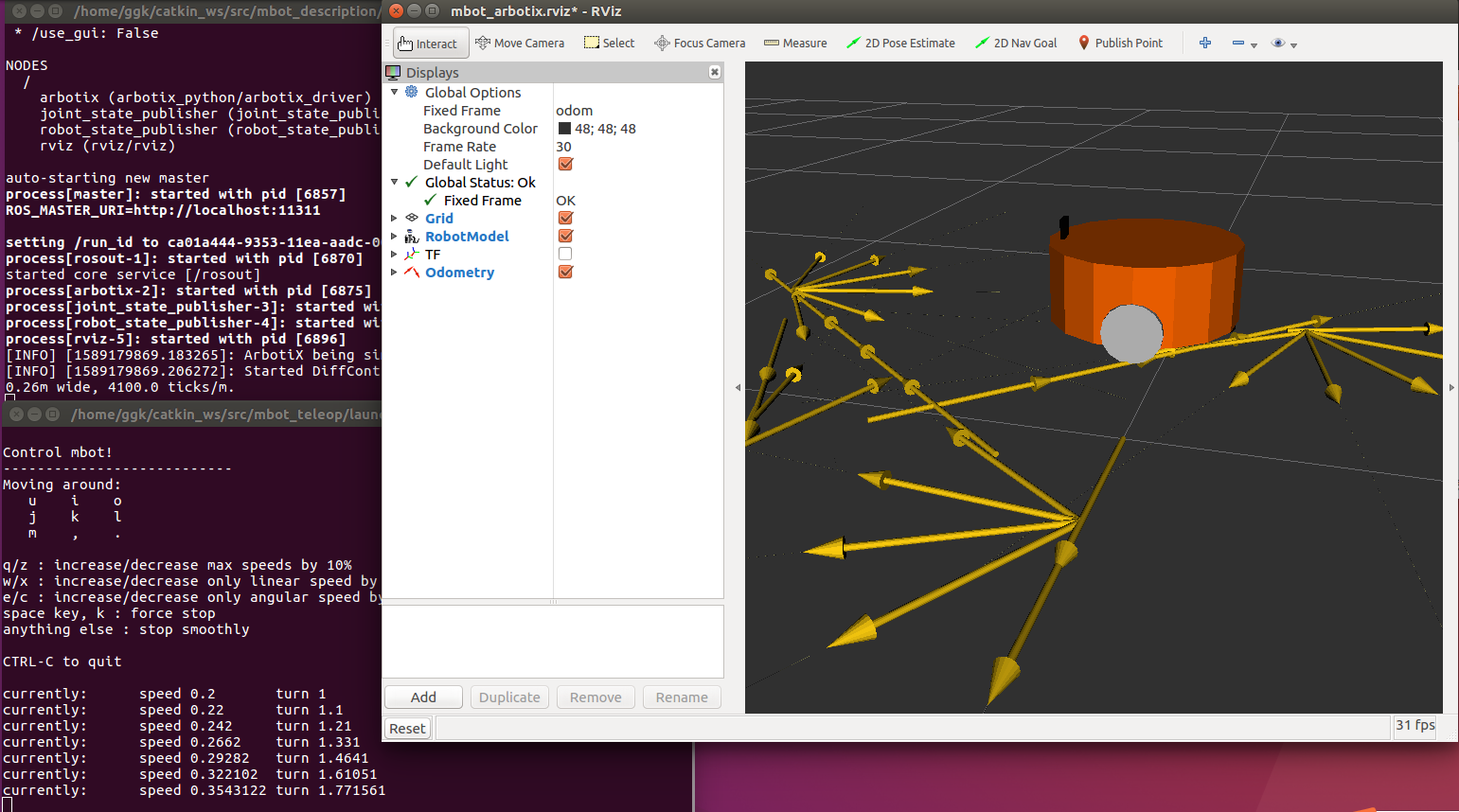
ROS中阶笔记(三):机器人仿真—ArbotiX+rviz功能仿真
01 机器人URDF模型优化—xacro模型文件1.1 xacro模型文件URDF模型的进化版本—xacro模型文件xacro里面的模型仍然是urdf模型,但是从整个模型的管理上发生了很大的变化精简模型代码1、创建宏定义2、文件包含提供可编程接口1、常量2、变量3、数学计算4、条件语句1.2 xac...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。