ubuntu16.04下ROS操作系统学习笔记(四 )机器人系组成、URDF机器人建模、xacro模型优化
机器人的定义与组成 机器人系统构建机器人系统的构建主要有以下几点:执行机构的实现:轮子、电机、舵机等。驱动系统的实现:电源子系统、电机驱动子系统、传感器接口等。内部传感系统的实现:机器人里程计:通过电机带动光删计数,实现对机器人运动速度的求取,然后计算积分得到里程。惯性测量单元(IMU):...
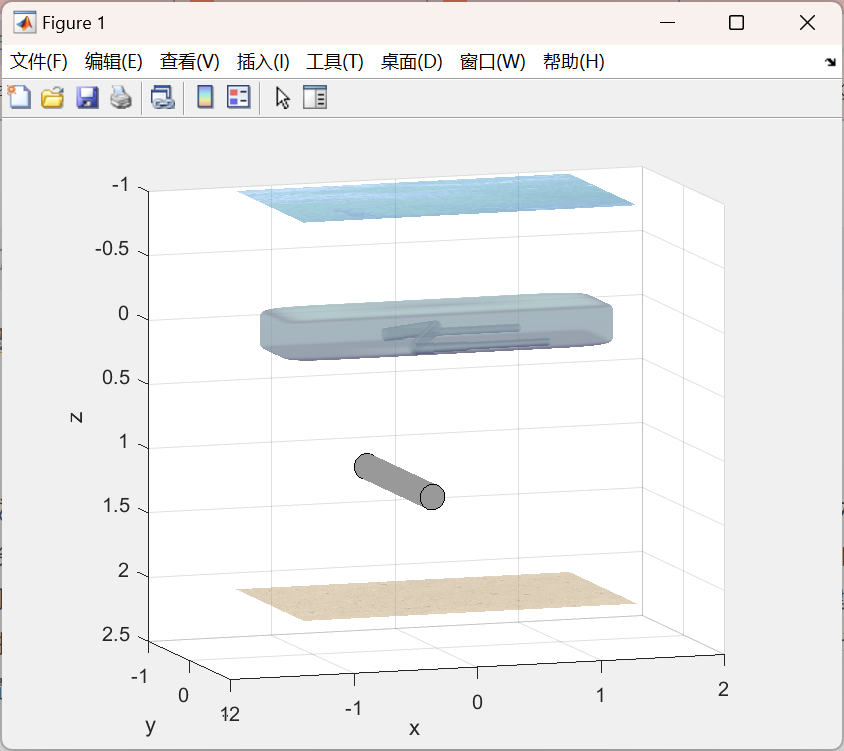
水下机器人双机械手系统动态建模与控制仿真(Matlab代码实现)
💥1 概述水下机器人-机械手系统(Underwater vehicle-manipulator systems, UVMS)可以完成除观测之外的水下采样、抓取、操作等任务,在海洋科学考察、海洋工程等领域得到广泛应用。通过对近年来国内外UVMS的研究现状进行综述,介绍了不同的UVMS本体结构与机械手...
URDF机器人建模
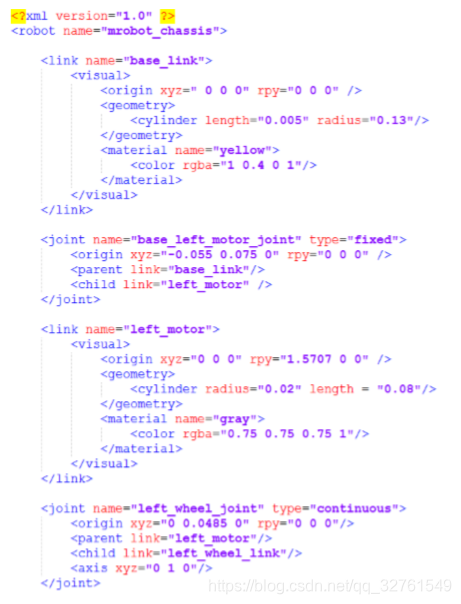
ROS学习不必须非要机器人硬件平台,需要了解如何创建机器人的模型 如何使用ROS中的URDF工具创建机器人的模型# 什么是URDFUnified Robot Description Format,统一机器人描述格式ROS中一个非常重要的机器人模型描述格式可以解析URDF文件中使用XML格式描述的机器...
ROS中阶笔记(二):机器人系统设计—URDF机器人建模
01 URDF理论1.1 什么是URDFUnified Robot Description Format,统一机器人描述格式;ROS中一个非常重要的机器人模型描述格式;可以解析URDF文件中使用XML格式描述的机器人模型;ROS同时也提供URDF文件的C++解析器(可以在C++代码中直接解析UR.....
平面2R机器人(二连杆)运动学与动力学建模+附仿真模型
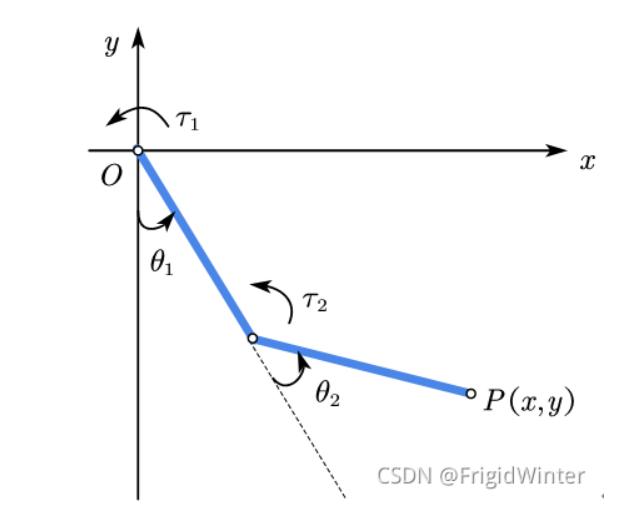
目录1 平面2R机器人概述2 运动学建模2.1 正运动学模型2.2 逆运动学模型2.3 机器人运动学仿真3 动力学建模3.1 计算动能3.2 势能计算与动力学方程3.3 动力学仿真1 平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标 θ 1 \the...
仿人机器人(五连杆、七连杆)拉格朗日动力学建模
目录1 仿生分析2 模型假设2.1 单脚支撑与双脚支撑阶段2.2 落地碰撞阶段3 模型建立4 参考文献1 仿生分析仿人机器人是基于仿生原理,在机械结构和运动过程上模仿人的行为以达到预期性能的机电装置。如图1.1所示,一般地,仿人机器人结构可分为七连杆,主导运动的腿部主要由髋关节、膝关节、踝关节组成,...
ROS_机器人urdf建模仿真实践
实践内容: 1、运用 urdf建模 实现案例中的机器人。 2、根据以上掌握的方法,再快速创建一个机器人模型。 成果图: 成果图 创建需要用到的功能包以及各种文件夹: Build跟devel两个文件夹在catkin_make之后会自动生成: 编写launch文件: 添加左轮: 编译: 启动: r...
《机器人自动化:建模、仿真与控制》——导读
前 言 Ⅰ.1状态表达式 与我们紧密相关的生物、经济和机械系统通常都可以用如下微分方程来描述: 目 录 第1章 建模1.1 线性系统1.2 机械系统1.3 伺服电动机1.4 习题1.5 习题解答第2章 仿真2.1 向量场的概念2.2 图形表示2.2.1 模式2.2.2 旋转矩阵2.2.3 齐次坐标2...
《机器人自动化:建模、仿真与控制》——2.4 习题
2.4 习题
《机器人自动化:建模、仿真与控制》——2.3 仿真
2.3 仿真 本节介绍用积分法对下述状态方程描述的非线性系统进行计算机仿真: 该方法是一种近似法,但容易理解,并且对于描述大多数机器人系统的行为是足够的。 2.3.1 欧拉法 2.3.2 龙格库塔法 2.3.3 泰勒法 欧拉法(实际上是1阶泰勒法)可以扩展到更高的阶数。在不失普遍性的前提下,让我们来...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。