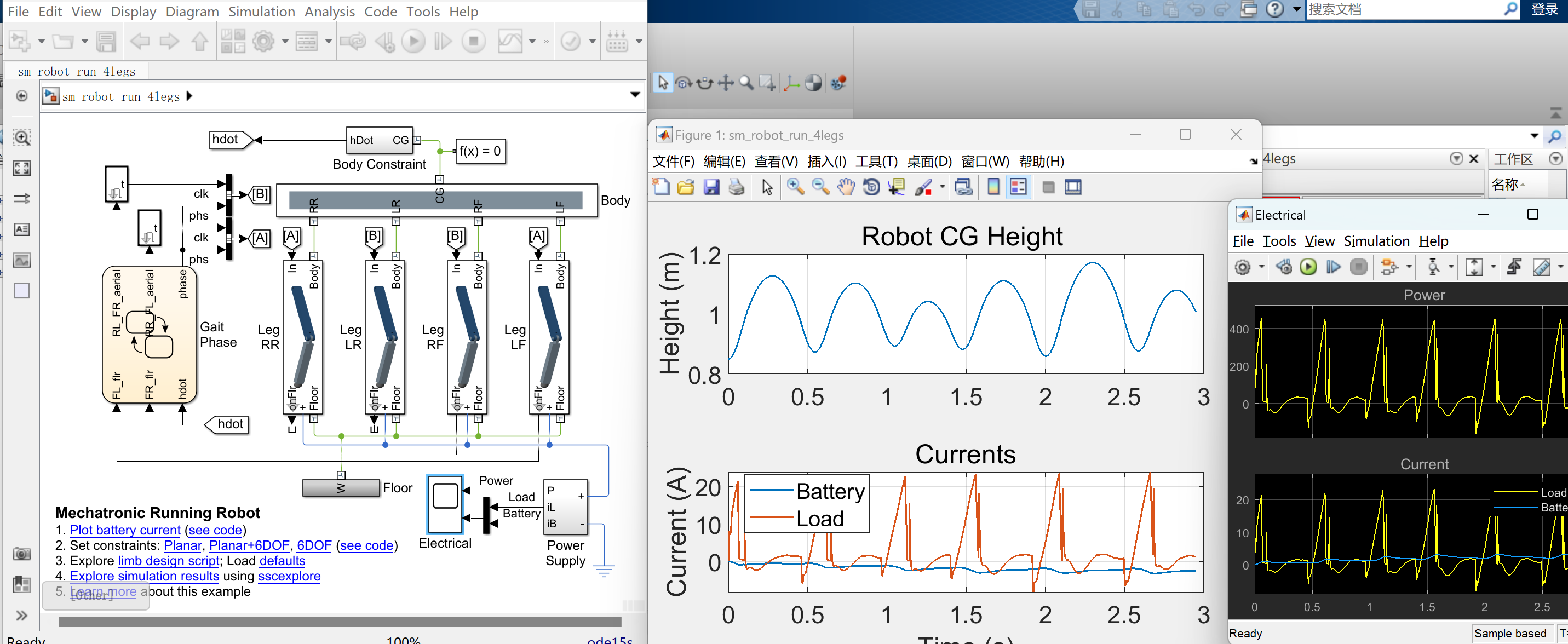
具有电动驱动的四足机器人模型研究(Simulink&Matlab代码)
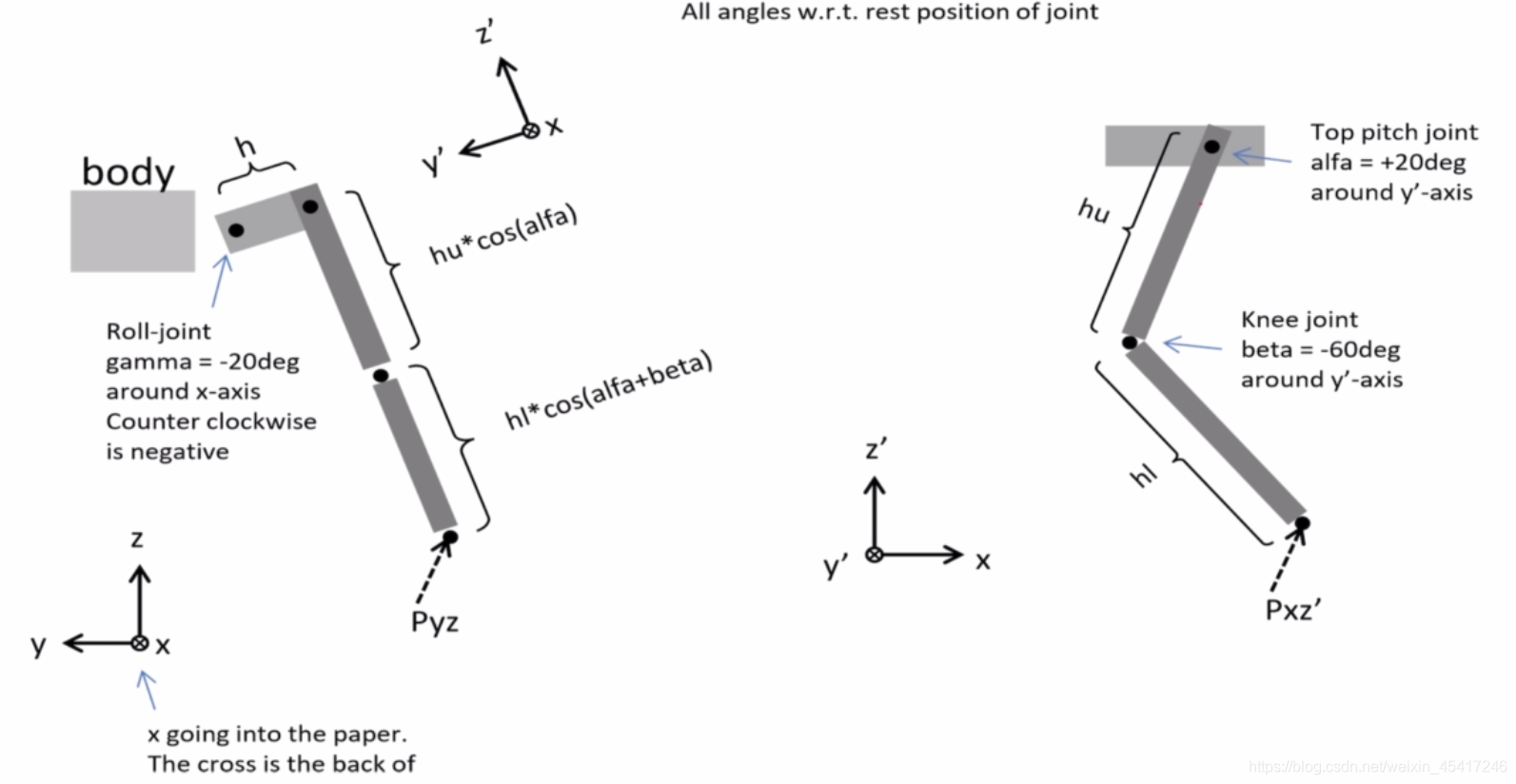
💥1 概述对具有电动驱动的四足机器人进行建模可以涉及以下几个方面:1.机械结构建模:对机器人的身体结构进行建模,包括身体的形状、大小和连接方式等。可以使用CAD软件进行三维建模,或者使用刚体模型进行简化建模。2.运动学建模:根据机器人的身体结构和关节连接方式,建立运动学模型,描述机器...
四足机器人
四足机器人的步态研究和分析是机器人控制和运动学领域的重要研究方向,主要涉及到四足机器人的运动规划、运动控制、步态优化和机器人稳定性等问题。 四足机器人的步态可以分为两种类型:静态步态和动态步态。静态步态是一种稳定的步态,适用于机器人在平面地面上行走。动态步态则是一种不稳定的步态,适用于机器人在复杂地...
智能物联网仿生四足机器人
一、 电子元器件选型1.1、 电机在本次课程设计中,针对仿生四足机器人,我们选用舵机作为他的关节。选择合适的舵机对于机器人的运动控制至关重要。以下是选取舵机时需要考虑的几个因素:1、扭矩(扭力):舵机的扭矩决定了其能够输出的转动力矩大小,足够的扭矩可以使机器人具有较强的运动能力。选取舵机时需要根据机...
浙江大学发布四足机器人“绝影”,爬坡踏雪稳定性令人惊艳
在视频中,“绝影”展现了反应快、姿态稳和定位准的特性。 日前,浙江大学熊蓉教授领导的机器人团队发布了一段四足机器人的视频。视频的主角是一个名为“绝影”的四足机器人,它在视频中展现了反应快、姿态稳和定位准的特性。 据悉,“绝影”身长1m,四足站立时有60cm高,重70kg,可载重20公斤,行走速度为6...
「镁客·请讲」宇树科技王兴兴:重构四足机器人“Laikago”,今年的任务是实现小批量量产
对于多足机器人的实际生活应用,在王兴兴看来还有待更多的技术进步。 众所周知,智能机器人领域有一个“超级网红”——波士顿动力公司以及旗下Atlas、SpotMini等一众多足机器人。每当成果公布,波士顿动力必然成为AI圈内的焦点之一。 的确,在运动控制能力方面,波士顿动力的成果是令人惊艳的。不过,国内...
从Big Dog到Spot Mini:波士顿动力「四足机器人」进化史
前不久,一段视频刷爆了朋友圈,视频中一个四足机器人不顾人类的阻拦,奋力打开一扇门,最终得以顺利通过。看过视频的人无一不被机器人的 “执着” 所震撼,一夜之间,这个机器人就成为了当之无愧的 “网红”。其实,这个“网红” 正是由美国波士顿动力公司研制的一款名为 “Spot Mini” 的四足机器人,这已...
日本大阪大学研究人员推出能够自动生成步态的弱力四足机器人
对于那些研发四足运动机器人的专家而言,往往需要耗费大量时间来制定机器人步态控制策略,这样才能确保它们行走时更加稳定、并适应各种不同环境。一般来说,科学家会使用先进的控制器来让机器人更有效地完成工作任务,比如向机器人指派给定任务,或是根据特定地形来选择适当的步态。 不过现在,一批来自日本大阪大学的研究...
真·稳如狗:中国团队推出四足机器人,对标波士顿动力
今日宇树科技发布了他们的四足机器人莱卡狗(Laikago),这是国内首个正式对外发布的四足机器人。 在足式机器人领域,创建于1992年的波士顿动力已经成了世界上最具影响力的机器人公司之一,在过去的25年一直保持研究的精神陆续研发出Petman、BigDog、Spot等双足或四足机器人,每一次都令业界...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。