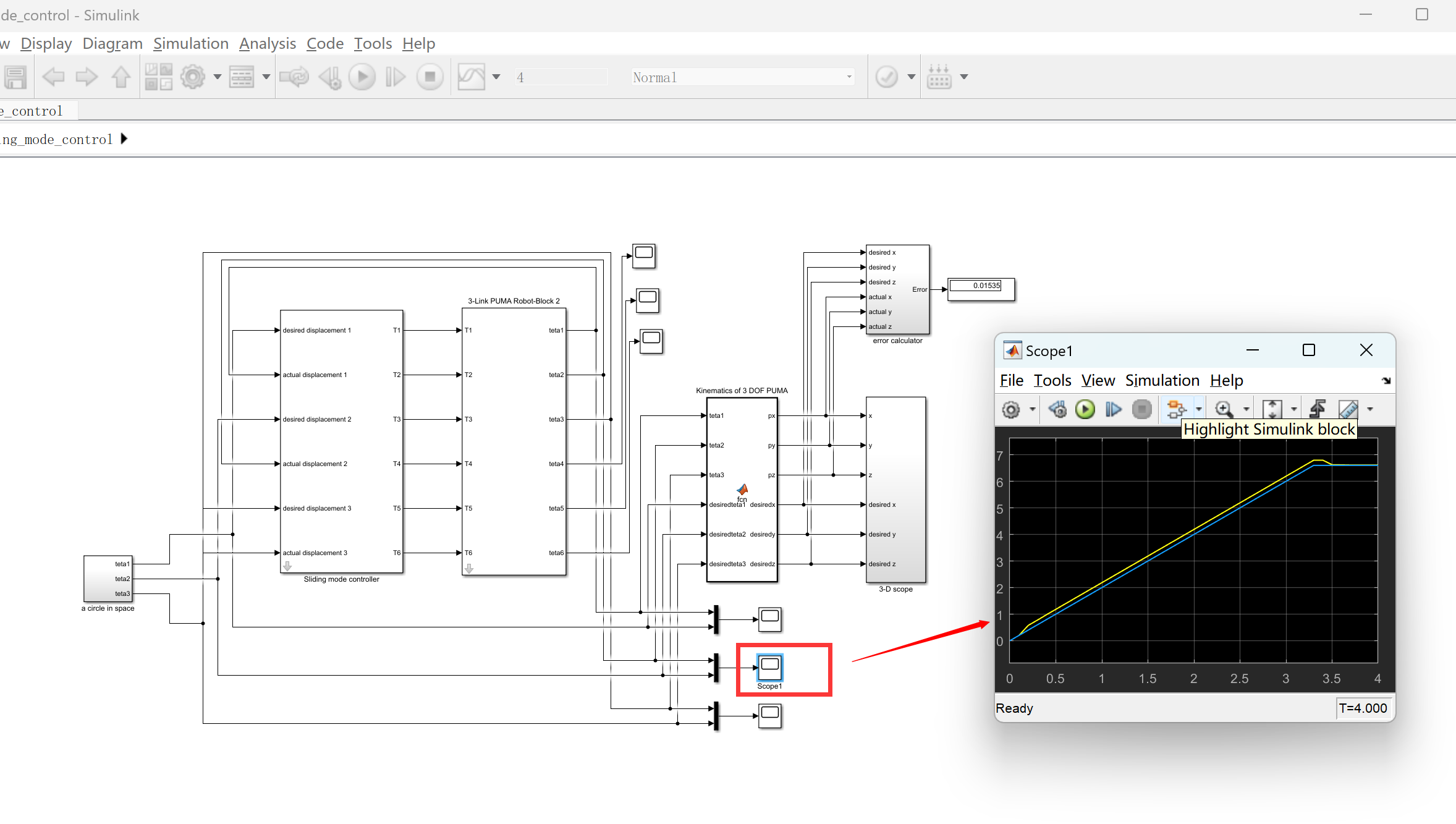
三自由度PUMA机器人非线性控制研究(Matlab代码、Simulink仿真实现)
💥1 概述针对三自由度PUMA560机器人的控制问题,可以使用三种不同的非线性控制算法:计算扭矩控制、滑模控制和反步控制。下面简要介绍这些算法的基本原理:1. 计算扭矩控制(Computed Torque Control):计算扭矩控制是一种基于模型的控制方法,通过反馈线性化将非线性...
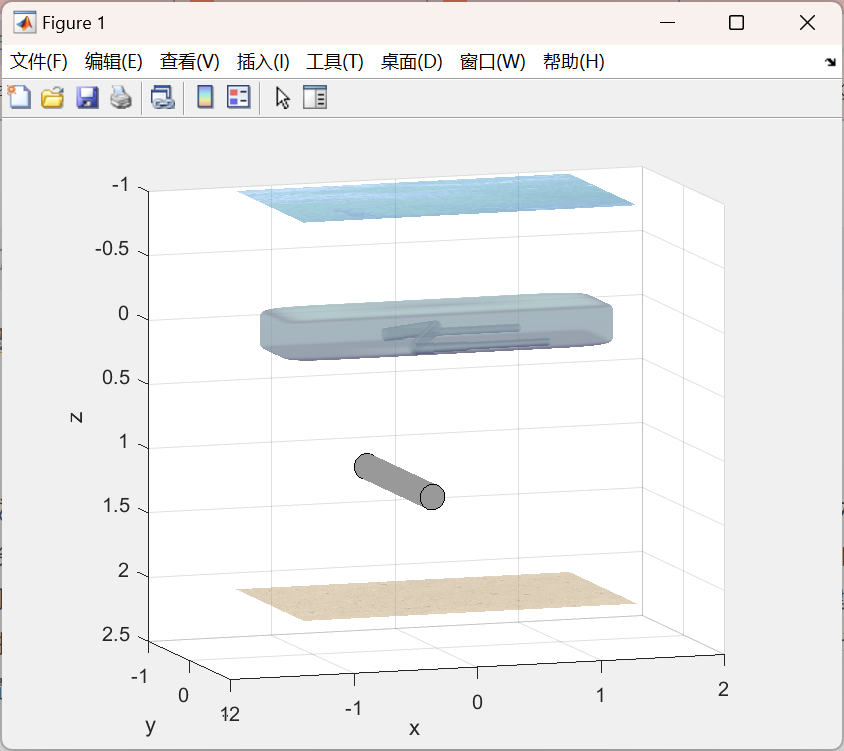
水下机器人双机械手系统动态建模与控制仿真(Matlab代码实现)
💥1 概述水下机器人-机械手系统(Underwater vehicle-manipulator systems, UVMS)可以完成除观测之外的水下采样、抓取、操作等任务,在海洋科学考察、海洋工程等领域得到广泛应用。通过对近年来国内外UVMS的研究现状进行综述,介绍了不同的UVMS本体结构与机械手...
[ros robot] --- 机器人系统仿真
1 机器人系统仿真概念机器人系统仿真:是通过计算机对实体机器人系统进行模拟的技术,在 ROS 中,仿真实现涉及的内容主要有三:对机器人建模(URDF)、创建仿真环境(Gazebo)以及感知环境(Rviz)等系统性实现。2 机器人系统仿真相关组件机器人的系统仿真是一种集成实现,主要包含三部分:URDF...
中国学者开发看护机器人仿真环境,还做了真人实验,获IROS 2022最佳论文之一
论文地址:https://arxiv.org/pdf/2210.10821.pdfGithub 地址:https://github.com/empriselab/RCareWorld论文主页:https://emprise.cs.cornell.edu/rcareworld/据 WHO 数据显示,世...
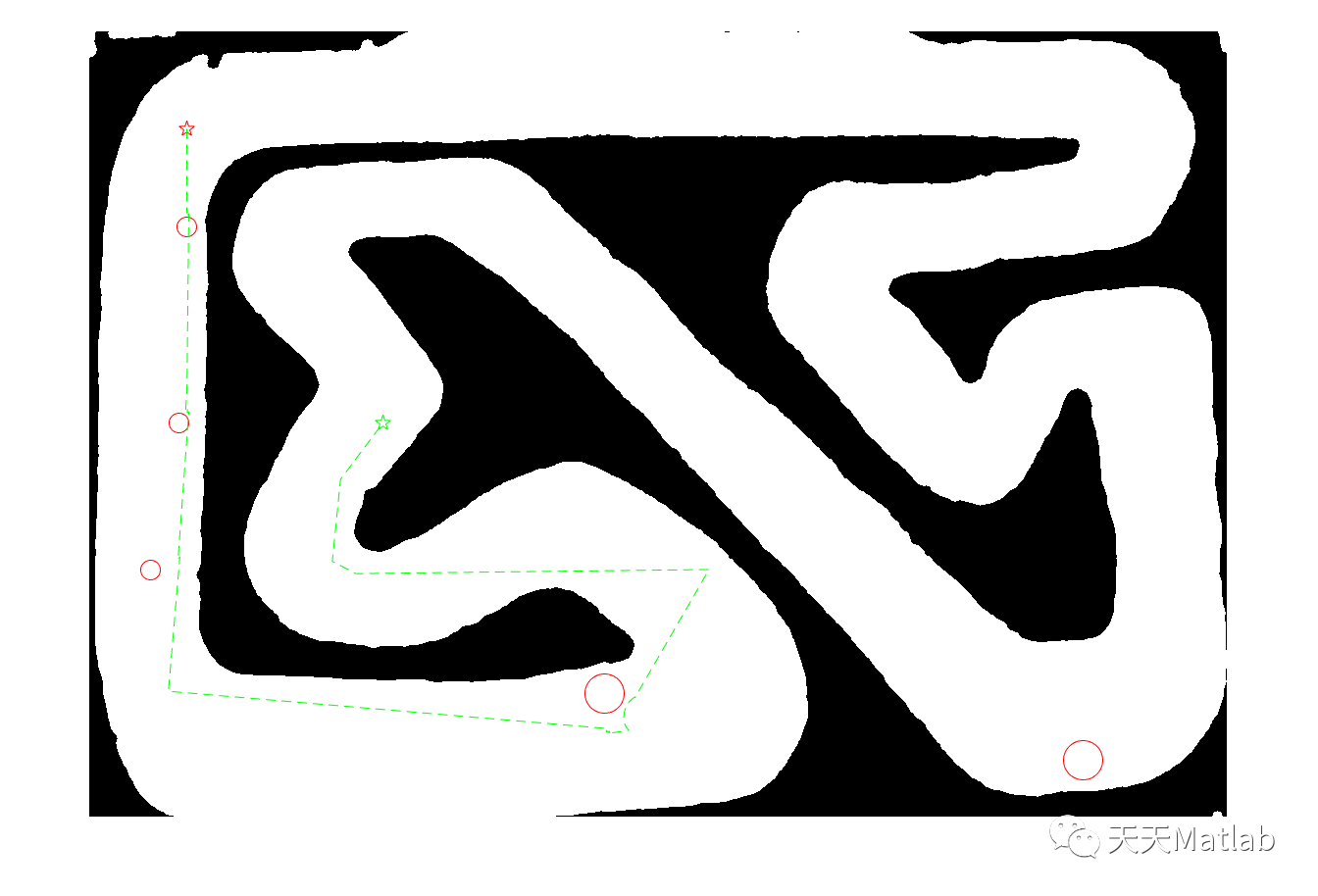
【路径规划】基于RRT+APF实现机器人二值地图动态避障算法附matlab仿真
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。🍎个人主页:Matlab科研工作室🍊个人信条:格物致知。更多Matlab仿真内容点击👇智能优化算法 神经网络预测 雷...
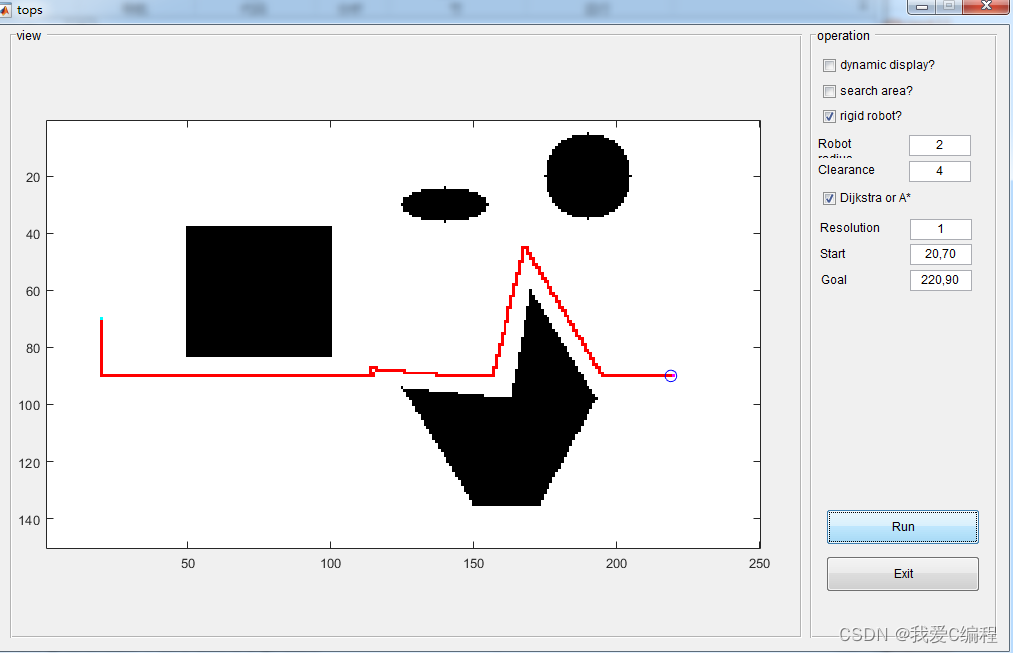
m分别使用Dijkstra算法和Astar算法进行刚体机器人最短路径搜索和避障算法的matlab仿真,带GUI界面
1.算法描述 Dijkstra(迪杰斯特拉)算法是典型的最短路径路由算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止(BFS、prime算法都有类似思想)。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。 算...
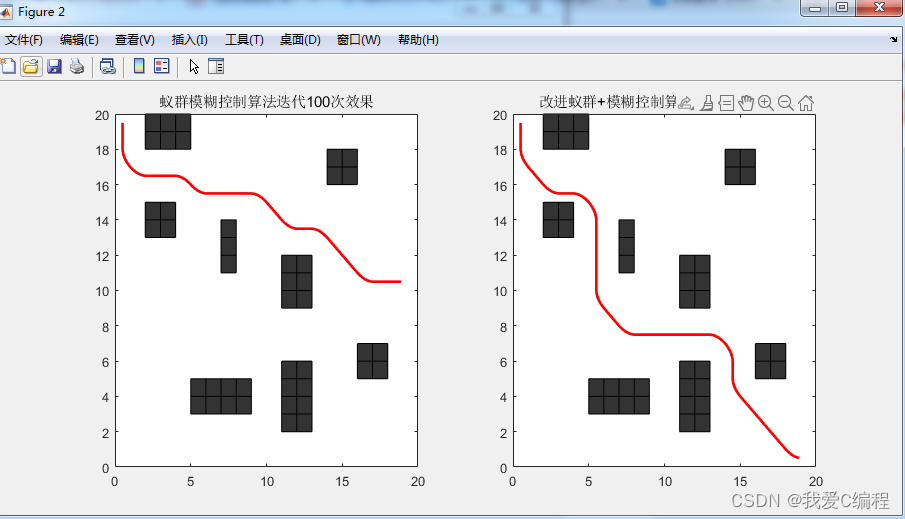
m基于蚁群优化模糊控制的机器人路线规划和避障算法matlab仿真
1.算法描述 蚁群算法是受到对真实蚂蚁群觅食行为研究的启发而提出。生物学研究表明:一群相互协作的蚂蚁能够找到食物和巢穴之间的最短路径,而单只蚂蚁则不能。生物学家经过大量细致观察研究发现,蚂蚁个体之间的行为是相互作用相互影响的。蚂蚁在运动过程中,能够在它所经过的路径上留下一种称之为信息素的物质,而此物...
基于Qlearning强化学习的机器人路线规划仿真
1.算法概述 假设我们的行为准则已经学习好了, 现在我们处于状态s1, 我在写作业, 我有两个行为 a1, a2, 分别是看电视和写作业, 根据我的经验, 在这种 s1 状态下, a2 写作业 带来的潜在奖励要比 a1 看电视高, 这里的潜在奖励我们可以用一个有关于 s 和 a 的 Q 表格代替, ...

虚拟数字机器人仿真测试验证平台(最大支持12个机器人关节)
一、平台特点真正提供机器人控制器检测、验证平台,可检测各类工业机器人控制器的功能、性能指标;全国产化,具备从虚拟机器人软件框架到硬件采集电路全方位自主开发;提供基于EtherCAT协议的检测、验证接口,提供“实物机器人+半物理平台+虚拟机器人”的运动及动力学系统辨识场景。允许基于EtherCAT总线...
Webots机器人仿真入门(一)
Webot介绍Webots是一款开源的多平台机器人仿真软件,为机器人的建模、编程和仿真提供了完整的开发环境。Webots由Cyberbotics公司开发,是一款优秀的开源多平台机器人仿真软件,为机器人的建模、编程和仿真提供了完整的开发环境。Webots开源免费、简单易用、文档齐全并且支持多种类型的机...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。