动态规划法在扫地机器人中的实战应用(基于动作值函数的策略迭代 python 附源码)
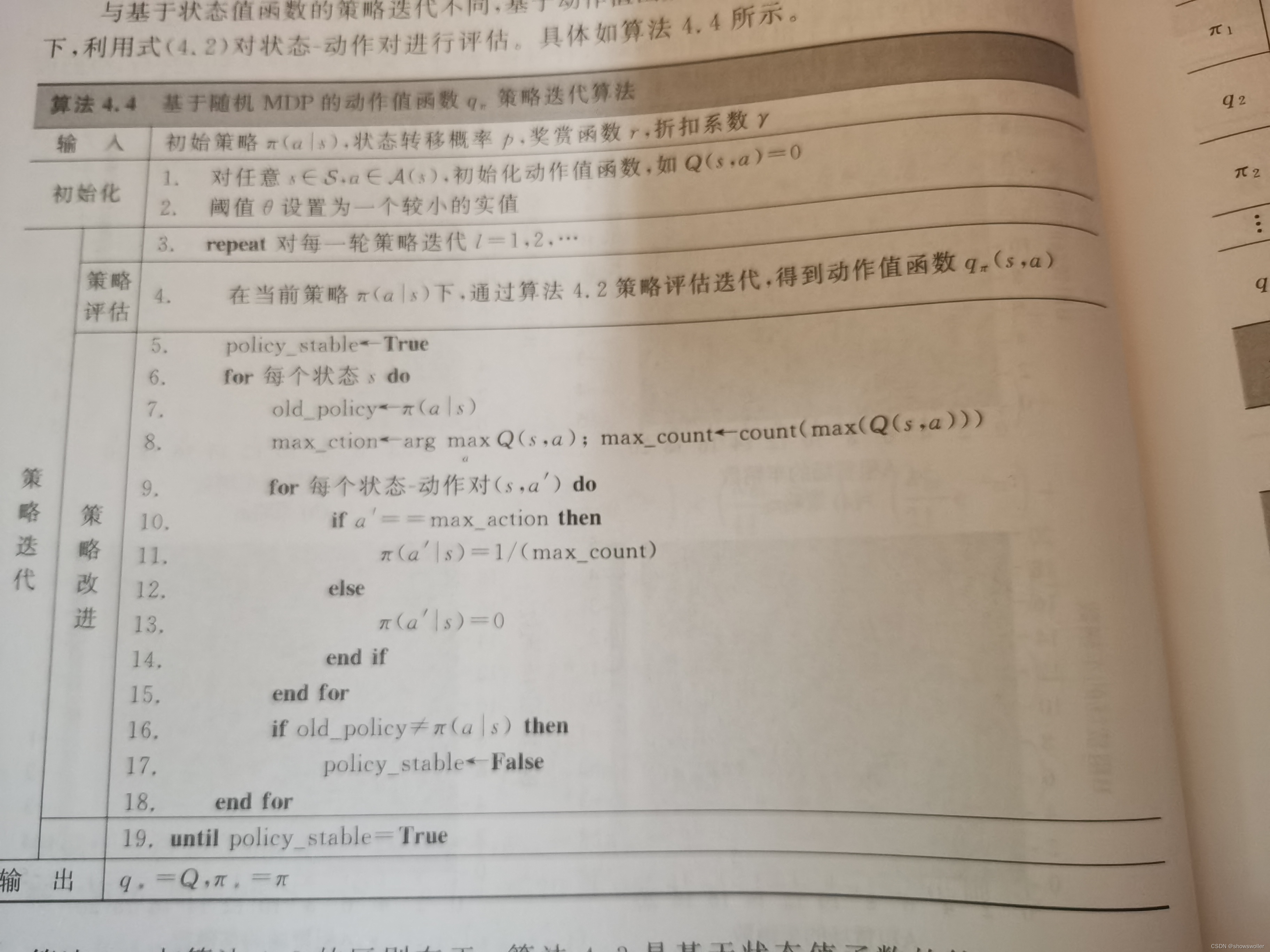
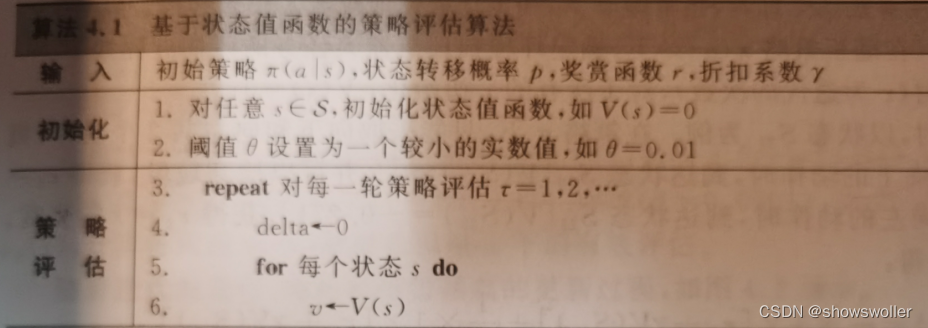
需要源码或觉得有帮助请点赞关注收藏后评论区留下QQ邮箱或者私信博主与基于状态值函数的策略迭代不同,基于动作值函数的策略迭代是在当前策略下用另一个式子进行评估。关于条件描述和环境搭建可以参考我这篇博客扫地机器人简介算法步骤如下下面通过基于动作值函数的策略迭代算法应用于确定环境的扫地机器人任务中,经过多...
动态规划法和策略迭代在扫地机器人中确定状态值和动作值函数的策略评估(python实现 附源码 超详细)
觉得有帮助或需要源码请点赞关注收藏后评论区留言或私信博主要在强化学习中,动态规划法主要用于求解有模型的MDP问题,尽管在现实任务中难以获得完备的环境模型,且动态规划法需要消耗大量的计算资源,但是作为强化学习的基础,动态规划法仍然具有非常重要的理论意义。动态规划法主要包括基于模型的策略迭代和基于模型的...

本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。