ubuntu20.04 ros-noetic 安装
官网 https://wiki.ros.org/noetic#Installation 各种遇坑,(其中避开了Ubuntu:NO_PUBKEY(找不到公钥)的问题)总结步骤如下: 使用镜像 USTC按如下步骤即可 导入key: sudo gpg --keyserver 'hkp://key...
Ubuntu20.04下折腾ROS
设置环境变量如下:运行小乌龟:控制小乌龟不跑啊


Ubuntu 安装 ROS 详细教程(以最后一个ROS1版本Noetic为例)
OS:Ubuntu 20.04ROS:Noetic 一、设置Ubuntu的软件和更新 在搜索框输入software,选择软件和更新一项,勾选 main、universe、restricted 和 multiverse,然后在Downlosd from选择一个中国的服务器,我选的上海交大的源,然后点 ...

ubuntu16.04下ROS操作系统学习笔记(八)机器人SLAM与 Gmapping-Hector_slam-Cartographer--ORB_SLAM(下)
接下来我们来启动演示一下:roslaunch mbot_gazebo mbot_laser_nav_gazebo.launchroslaunch mbot_navigation hector_demo.launchroslaunch mbot_teleop mbot_teleop.launch效果如...
ubuntu16.04下ROS操作系统学习笔记(五)gazebo物理仿真环境搭建、加载服务端模型数据减少报错
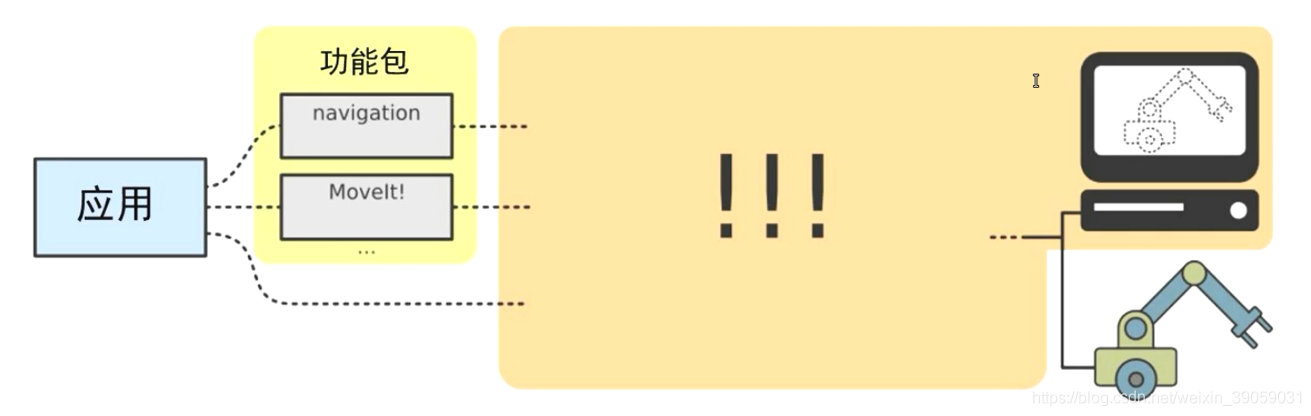
ROS_ControlROS为开发者提供的机器人控制中间件。包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等。可以帮助机器人应用功能包快速落地,提高开发效率。ros_control的定位就是上层应用功能包和底层接口之间的连接的。控制器有一些插件,通过硬件抽象层来对其进行控制。上层应用计...

ubuntu16.04下ROS操作系统学习笔记(三 / 三)ROS基础-实现分布式通信
ROS是分布式的节点,这样的话我们就可以将程序运行上的节点放到大型机器上面,分担机器人运行的压力。接下来我们来看一下怎么实现分布式通讯,怎么在多机上运行统一的程序。ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合。那么我们如何来实现分布式多机通讯呢:设置IP地址,确保底层链路的联通,假设...
ubuntu16.04下ROS操作系统学习笔记(三 / 二)ROS基础-ROS通信编程(上)
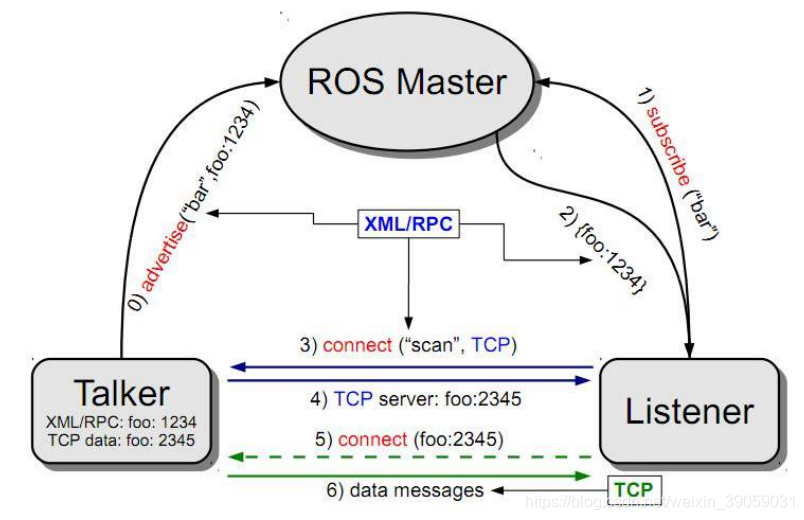
1.话题编程首先我们要有一个发布话题的Talker,还要有一个订阅话题的Listener,然后就是负责管理整个系统的ROS Master。话题编程的流程主要是以下四个步骤:创建发布者创建订阅者添加编译选项运行可执行程序上面的前两步是编程实现的,第三步是通过编译的方式生成可执行文件。最后一步就是去运行...
ubuntu16.04 下ROS操作系统学习笔记(一)ROS-kinetic安装
1.解决VMware运行Ubuntu无法跨系统复制粘贴的问题,需要运行一下三行命令。 $ sudo apt-get autoremove open-vm-tools $ sudo apt-get install open-vm-tools $ sudo apt-get install open-vm...

ubuntu 16.04+ros kinetic + gazebo+ aws-robotics 室内环境导航仿真
背景:aws-robotic ros-gazebo 仿真在ros2以及ros melodic 中的使用网上讲解较多,本文主要介绍ros kinetic +gazebo9 下turtlebot3 机器人在 aws-robomaker-small-house-world中的导航仿真。一、 gazebo ...

【ubuntu】ubuntu20.04安装ros noetic(亲测有效,附操作步骤)
一、安装ROS neotic步骤第一步:换源这一步非常重要,决定着后面安装ROS能否成功的关键一步。这里,我选择了华为云。第二步:添加ROS软件源sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) m...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






