【ZYNQ】裸机 PS + PL 双网口实现之 SDK 程序设计
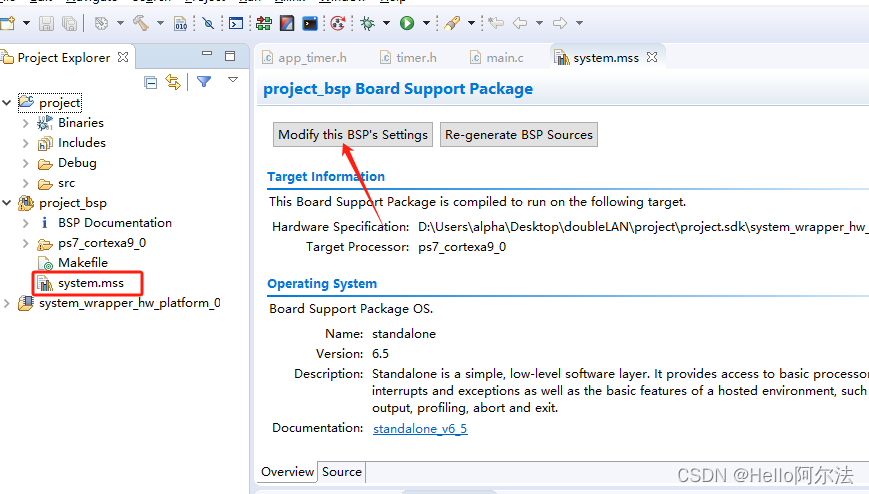
涉及 lwip 库文件及 ZYNQ 配置相关可参考以下文章: 【ZYNQ】裸机 PS + PL 双网口实现之 LWIP 库文件修改 【ZYNQ】裸机 PS + PL 双网口实现之 ZYNQ 配置 工程配置 启动 SDK ,创建模板工程,配置 BSP。 ...
【ZYNQ】裸机 PS + PL 双网口实现之 ZYNQ 配置
目前,在 ZYNQ 中进行以太网开发的方案,大部分都是基于通过 PS 的 MIO 以 RGMII 接口连接外部 PHY 芯片的方式。但是,由于使用 PS 的 MIO 只能以 RGMII 接口连接外部 PHY 芯片,这就限制了支持其他接口 PHY 芯片的使用,如 GMII、SGMII、MII 等等。因...
【ZYNQ】裸机 PS + PL 双网口实现之 LWIP 库文件修改
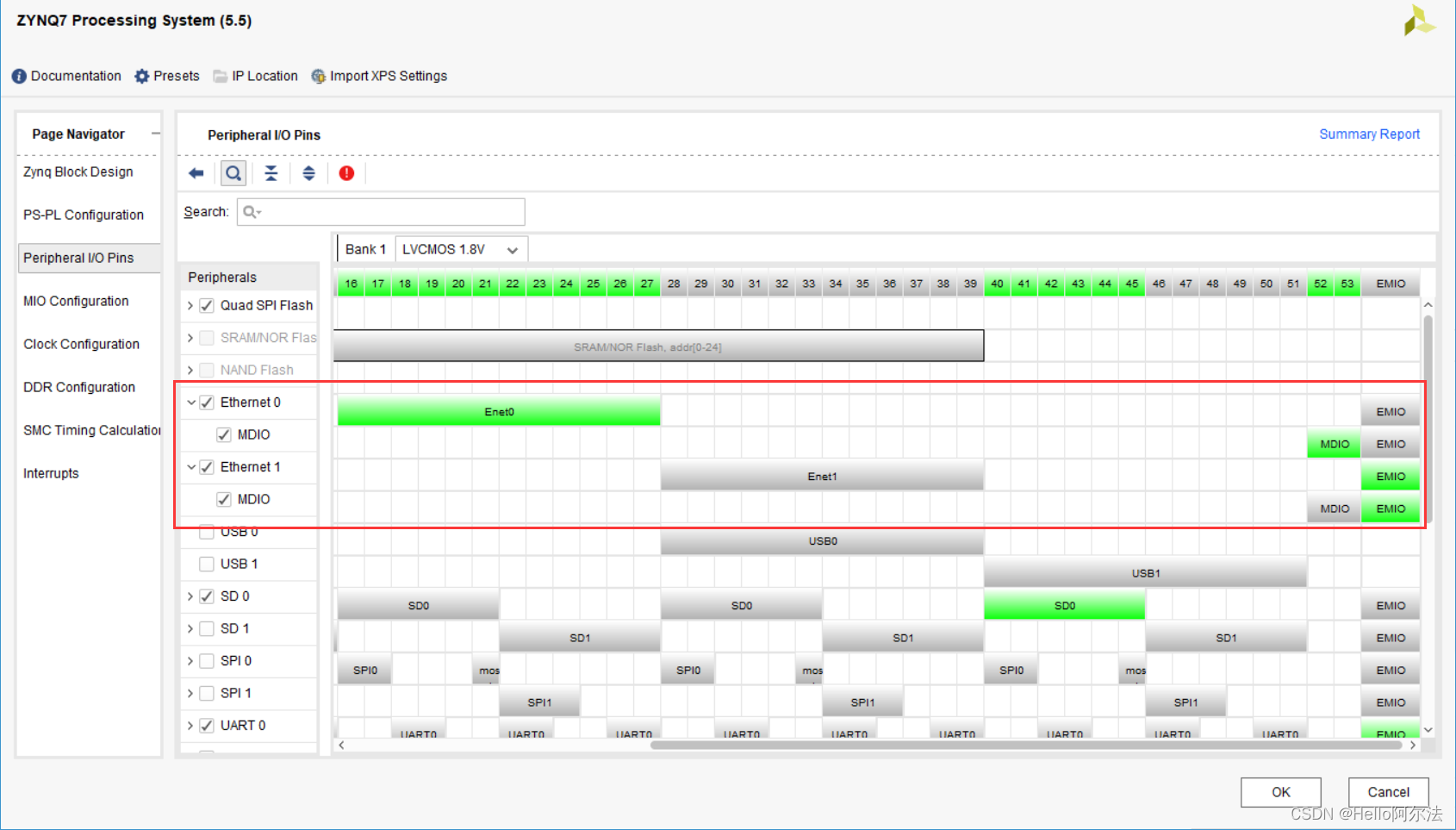
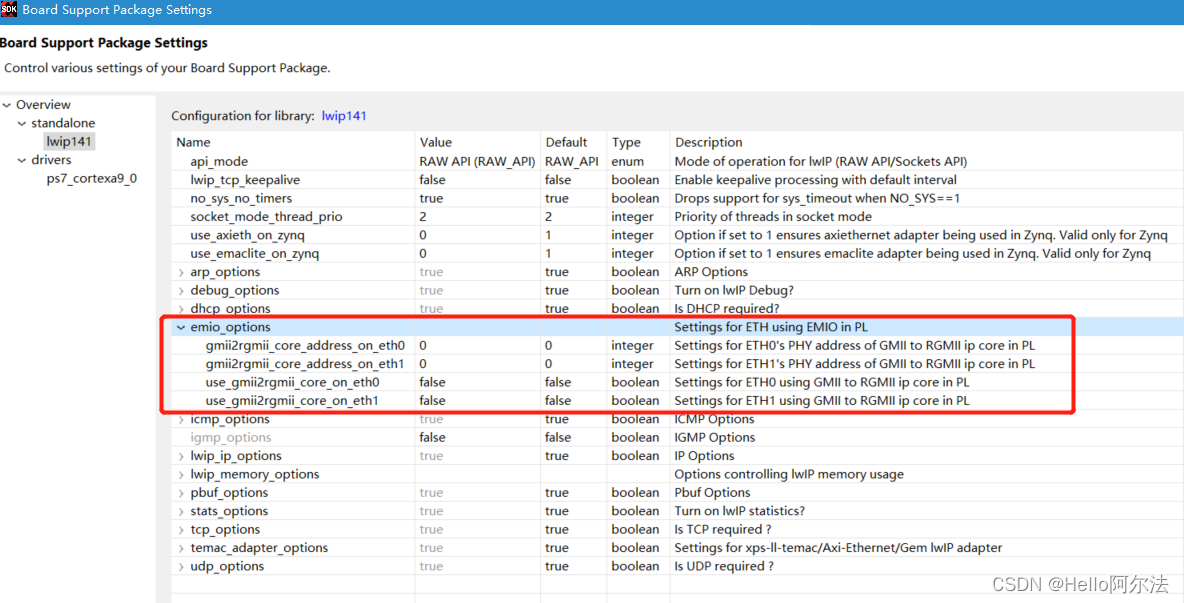
因项目需要,为实现 Zynq 裸机双网口通信功能,其中 ENET0 连接 PS 端网口,ENET1 通过 EMIO 扩展连接 PL 端网口,原 LWIP 库无板载 PHY 芯片支持及 EMIO 配置选项,故将 LWIP库文件进行修改以满足功能需求。 修改对象 Xilinx Vivado 2017.4...
zynq 7000 sdk下裸机can(ps/pl) 调试
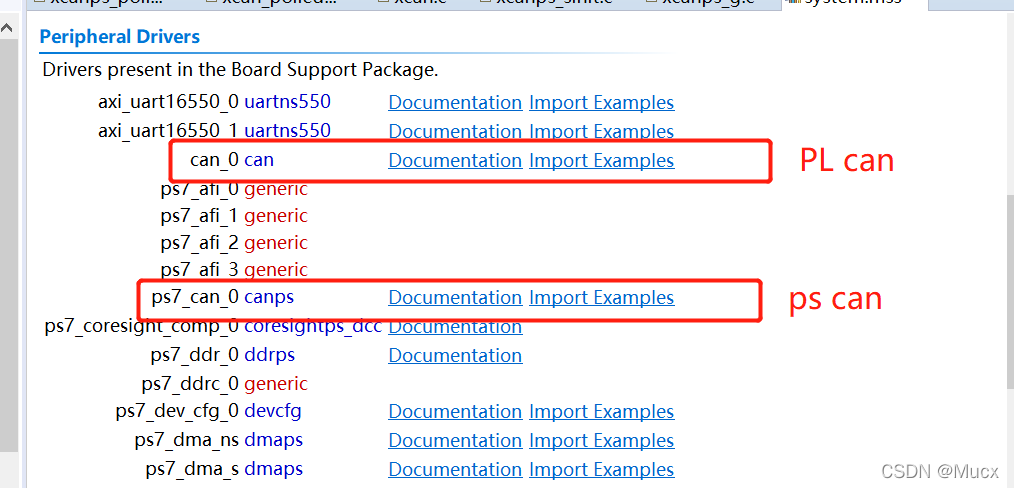
1. SDK下打开system.mss文件,如下图所示,import examples导入polled相关例程。因为我们的设备上有两个can,一个ps端一个pl端的,原理图在can收发器侧一样。2. ps 端参调试确定逻辑对ps can的clock配置值,为100M,参考《ug585-Zynq-70...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
