LabVIEW对并行机器人结构进行建模仿真
LabVIEW对并行机器人结构进行建模仿真 为了对复杂机器人结构的数学模型进行建模、搜索、动画和验证,在工业机器人动态行为实验室中,设计并实现了具有五个自由度的单臂型机器人。在研究台上可以区分以下元素:带有直流电机和编码器的机器人;稳定的连续电压源;加速度计;PWM;放大块;屏幕;计算机;万用表;连...
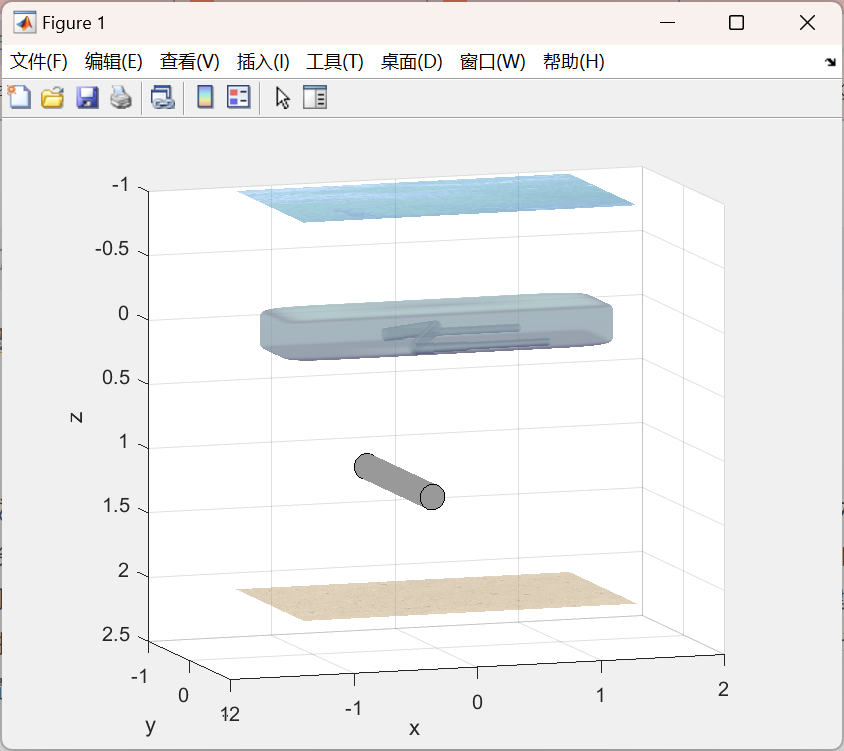
水下机器人双机械手系统动态建模与控制仿真(Matlab代码实现)
💥1 概述水下机器人-机械手系统(Underwater vehicle-manipulator systems, UVMS)可以完成除观测之外的水下采样、抓取、操作等任务,在海洋科学考察、海洋工程等领域得到广泛应用。通过对近年来国内外UVMS的研究现状进行综述,介绍了不同的UVMS本体结构与机械手...
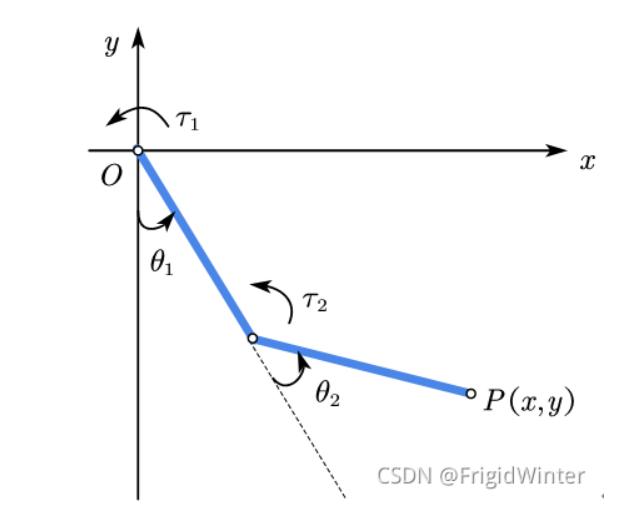
平面2R机器人(二连杆)运动学与动力学建模+附仿真模型
目录1 平面2R机器人概述2 运动学建模2.1 正运动学模型2.2 逆运动学模型2.3 机器人运动学仿真3 动力学建模3.1 计算动能3.2 势能计算与动力学方程3.3 动力学仿真1 平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标 θ 1 \the...
ROS_机器人urdf建模仿真实践
实践内容: 1、运用 urdf建模 实现案例中的机器人。 2、根据以上掌握的方法,再快速创建一个机器人模型。 成果图: 成果图 创建需要用到的功能包以及各种文件夹: Build跟devel两个文件夹在catkin_make之后会自动生成: 编写launch文件: 添加左轮: 编译: 启动: r...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。