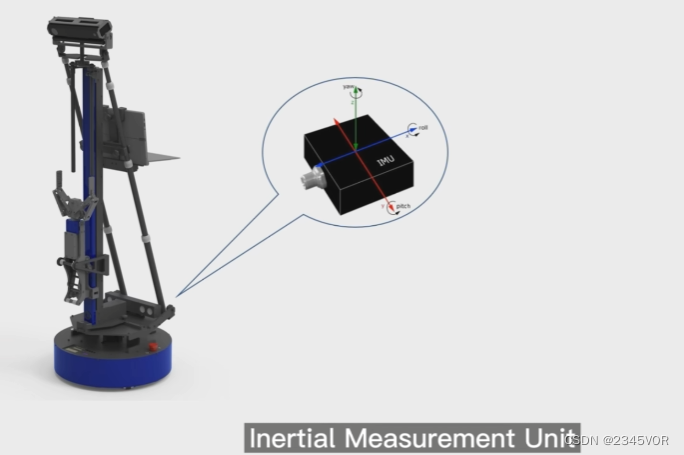
【7. ROS 中的 IMU 惯性测量单元消息包】
1. 前言Ubuntu环境搭建【经典Ubuntu20.04版本U盘安装双系统教程】【Windows10安装或重装ubuntu18.04双系统教程】【Ubuntu同步系统时间】【Ubuntu中截图工具】【Ubuntu安装QQ】【Ubuntu安装后基本配置】【Ubuntu启动菜单的默认项】【ubuntu...
ROS学习-编译Package包
开始之前,先确定我们找到环境设置文件的来源,使用sourc命令,类似于下述形式:source /opt/ros/kinetic/setup.bash注意如果我们在安装ros过程中把上述命令添加到.bashrc中,那么就不需要每次都重复使用这个命令 echo “source/opt/ros/melod...

ROS学习-创建一个Package包
Package由什么组成?每一个Package中都必须包括以下两个文件:package.xml能够提供当前Package包的描述(元)信息CMakeLists.txt如果它是一个catkin元包,它必须具有相关的样板文件CMakeLists.txt文件。此外,每个Package包必须有其自己的文件夹...

ROS——深度图转换伪面阵激光——depthimage_to_laserscan 功能包
depthimage_to_laserscan这个ROS功能包的wiki功能depthimage_to_laserscan 使一张深度图像 生成一个2D的激光雷达扫描图像这个功能包使用的是 lazy 订阅,就是说只有有订阅者订阅 /scan的时候才订阅/image或者/camera_info订阅的信...

在ROS 中 功能包 中将类的函数定义 与 声明 分开 文件写 用main.cpp 调用 如何配置 CmakeList.txt
需要配置 CmakeList.txt遇到问题的工程 这样搞了下add_library(quadrotor_control_for_fengdian_class src/QuadrotorControl.cpp ) target_link_libraries(quadrotor_control_for...

ROS 环境下 安装 turtlebot3 功能包及其仿真包 并测试 —— 全流程(报错及解决)
下载 turtlebot3 功能包turtlebot 太老了可能,仿真只有indigo版本 ,直接用 3吧ros的turtlebot wikiturtlebot官网教程开始安装 turtlebot3 git网址git上下载指定版本git clone -b 版本名 总网址git clone -b ki...
ros_control功能包
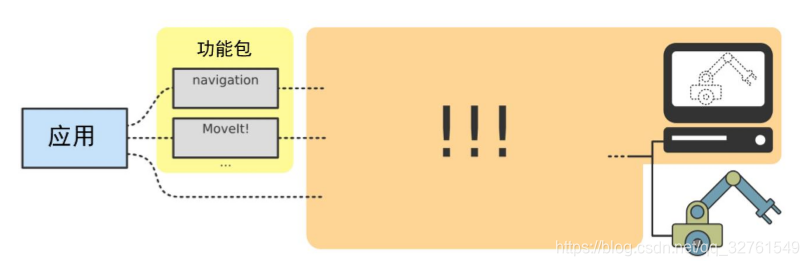
ros_control功能包介绍ros中与gazebo仿真关系很大的功能包 ros_control功能包 也是ros_control软件框架ros中会提供很多机器人相关的功能,机器人导航、定位等,但这些功能基本都停留在机器人上层应用的一个阶段的功能包这些功能包最终如何应用到机器人上去!!!部分就是r...

相机和livox激光雷达外参标定:ROS功能包---livox_camera_lidar_calibration 使用方法
livox_camera_lidar_calibration 功能包介绍该功能包提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角...
相机和livox激光雷达外参标定:ROS功能包---livox_camera_lidar_calibration 介绍
@TOC相机与激光雷达外参标定什么是相机与激光雷达外参标定?就是相机坐标系和激光雷达坐标系的TF变化。位置x,y,z 欧拉角 roll,pitch,yaw,6个变量构成一个4*4的旋转变换矩阵标定的就是这个4维的旋转矩阵。标定的方法有:基于特征基于运动观测基于最大化互信息基于深度学习基于特征 的方法...
ROS中阶笔记(七):机器人SLAM与自主导航—SLAM功能包的使用(下)
2.2.4 启动hector_slam演示分别开启三个终端运行以下命令:$ roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch # 动一个gazebo仿真节点 $ roslaunch mbot_navigation hector_demo.launc...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






