百度搜索:蓝易云【Ros终端出现找不到bash: /home/***/devel/setup.bash: 没有那个文件或目录怎么办?】
出现 "找不到bash: /home/ * /devel/setup.bash: 没有那个文件或目录" 错误通常是由于ROS环境变量没有正确设置导致的。要解决这个问题,您可以按照以下步骤进行操作: 首先,确认您是否正确安装了ROS,并且已经设置了ROS环境变量。确保在终端中运行以下命令: sourc...
linux如何让ros文件在任何终端中运行:三行代码搞定
echo "source ~/你的ros文件目录/setup.bash" >> ~/.bashrcsource .bashrcrosrun ros文件的包名 ros文件节点名

ROS2 编译含有自定义消息项目报错:msg/detail/header__struct.h: 没有那个文件或目录
项目场景: 当迁移ROS 1 项目到 ROS 2 时,有时候会遇到消息类型的变化和更新,消息类型可能需要进行一些调整以适应新的ROS 2要求。本文将介绍如何处理自定义消息中的Header字段,以确保项目能够顺利地适应ROS 2的消息类型定义。 问题描述 在编译ros2 包时发现当项目包引入一个从ro...
ROS学习-从bag文件中读取messages
学习两种从bag文件指定topic中读取message的方式,包括使用ros_readbagfile脚本的方式。下载或者记录bag文件首先,我们需要一个bag文件。可以从上一个博客:ROS学习-记录和回放数据中生成,或者从webviz中下载一个demo也可以通过下述命令:wget https://o...
ROS学习-使用rosed来编辑ROS中的文件
此博客将介绍如何使用rosed来使得编辑更加容易。使用rosed命令rosed命令是rosbash集合的一部分,其允许我们能够不使用package包的路径而仅使用package包的名字来直接编辑包中的文件。用法如下:$ rosed [package_name] [filename]例如对roscpp...
ROS学习-了解ROS的文件结构
开始之前,我们先安装一个ros-tutorials中的package,使用下述命令:sudo apt-get install ros-<distro>-ros-tutorials把上述命令中的换成你的ros版本,比如说我的是melodic,则上述命令变为:sudo apt-get ins...
ros中运行launch文件提示无法找到的错误
在ros中已经运行了catkin_make以后,直接运行roslaunch 或者rosrun的命令后提示无法找到相应文件这时需在对应的工作空间中打开终端接着输入source devel/setup.bash再运行上述的roslaunch或者rosrun命令即可完成操作

在ROS 中 功能包 中将类的函数定义 与 声明 分开 文件写 用main.cpp 调用 如何配置 CmakeList.txt
需要配置 CmakeList.txt遇到问题的工程 这样搞了下add_library(quadrotor_control_for_fengdian_class src/QuadrotorControl.cpp ) target_link_libraries(quadrotor_control_for...

ROS中CMakeLists.txt文件 使用 讲解与总结
CMakeLists.txt作用在ROS系统的功能包中 要包含 CMakeLists.txt 与 package.xml 文件 来 编译功能包的内容CMakeLists.txt原本是Cmake编译系统的规则文件,而Catkin编译系统基本沿用了CMake的 编译风格,只是针对ROS工程添加了一些宏定...
【古月21讲】ROS入门系列(4)——参数使用与编程方法、坐标管理系统、tf坐标系广播与监听的编程实现、launch启动文件的使用方法
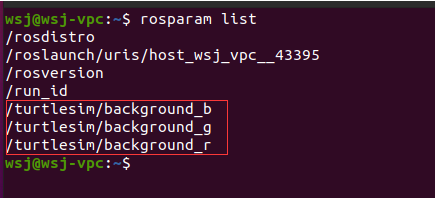
1、参数的使用与编程方法创建功能包cd ~/catkin_ws/src catkin_create_pkg learning_parameter roscpp rospy std_srvs 2.相关参数命令使用rosparam list 列出当前所有参数注意上图红色框图部分,这里可能和RO...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






