【4. ROS的主要通讯方式:Topic话题与Message消息】(2)
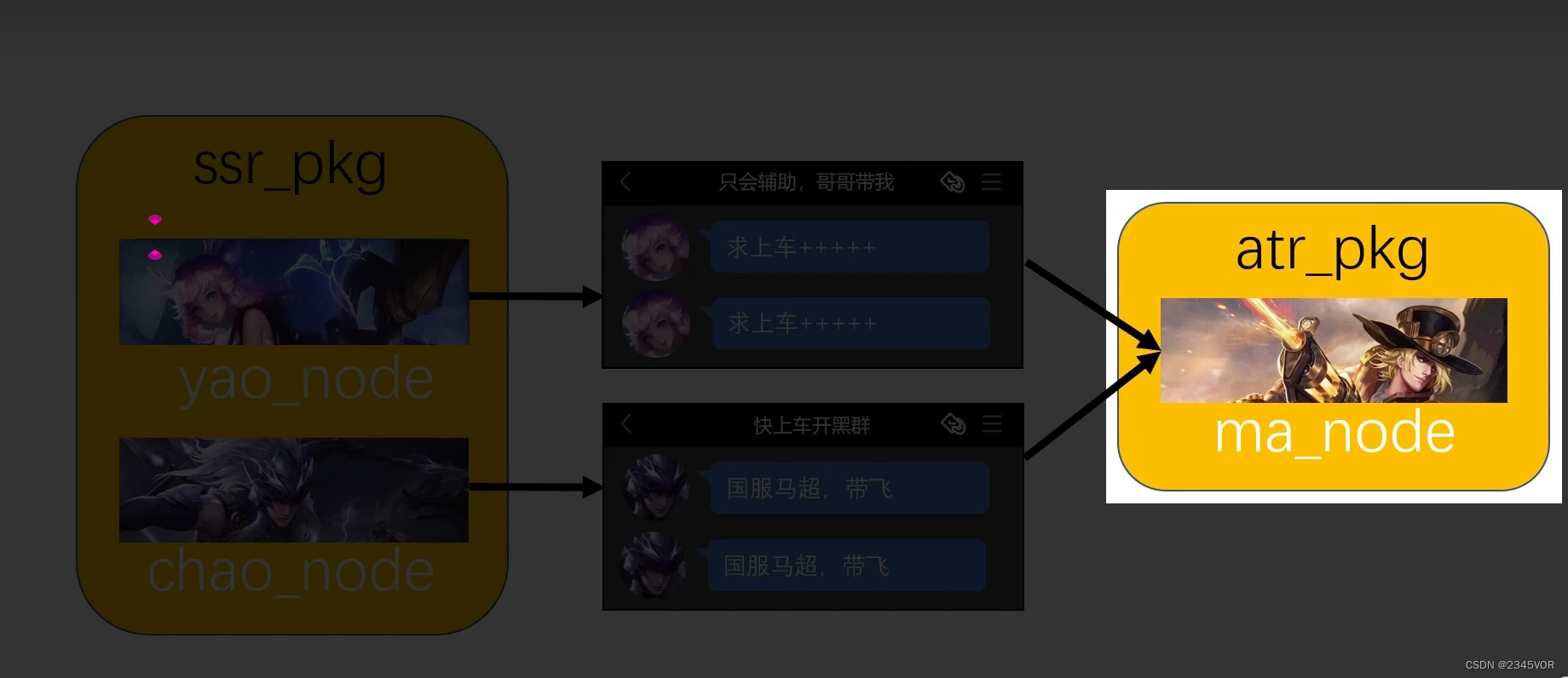
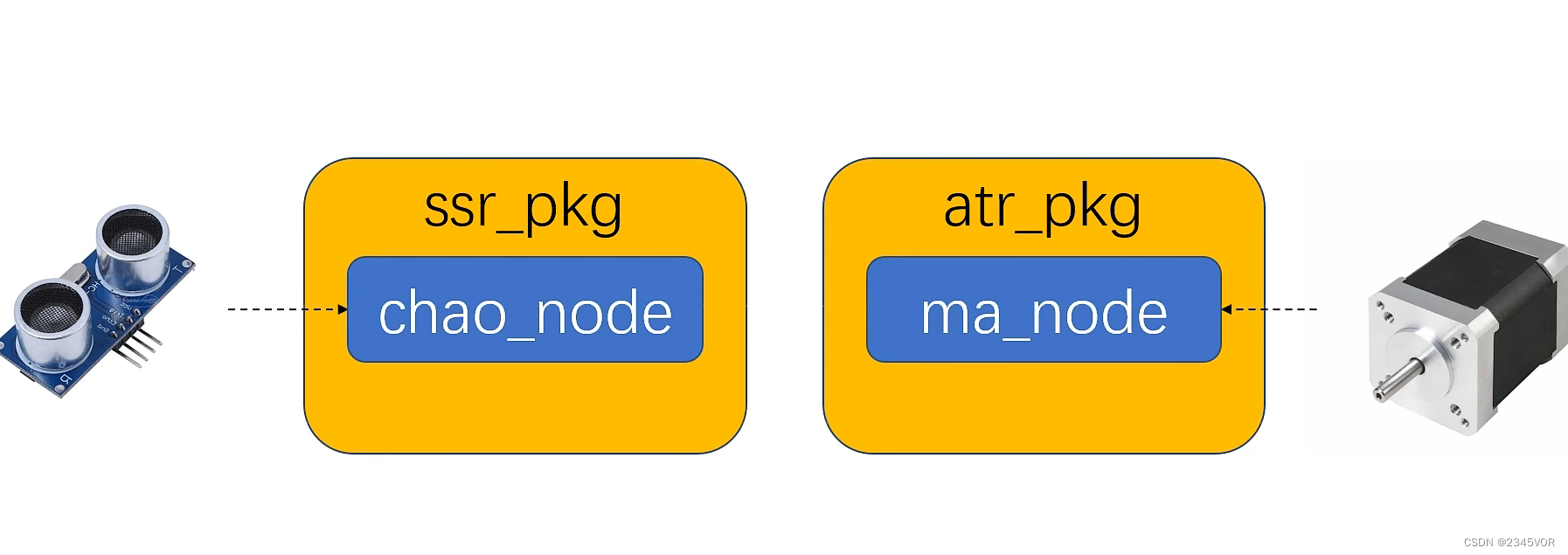
6. 使用C++实现Subscriber订阅者根据需求创建atr_pkg包的ma_node订阅节点6.1 创建订阅者节点创建Package软件包创建在~/catkin_ws/src文件夹里catkin_create_pkg<包名><依赖项列表>catkin_creat_pkg...
【4. ROS的主要通讯方式:Topic话题与Message消息】(1)
1. 前言本教程是B站阿杰视频的笔记视频地址:https://www.bilibili.com/video/BV1qa41137ED1.1 王者解释结点通讯:话题topic发布者publisher订阅者subsciber1.2 通讯小结话题Topic是节点间进行持续通讯的一种形式。话题通讯的两个节点...


【ROS】如何让ROS中节点实现数据交换Ⅰ--ROS话题通信
Halo,这里是Ppeua。平时主要更新C语言,C++,数据结构算法…感兴趣就关注我吧!你定不会失望。0.ROS文件系统及常用指令roscore 启动ros核心节点roscd 将工作空间切换到指定ros功能包catkin_create_pkg 将工作空间切换到指定ros功能包**rqt_gra...
![[ROS通信机制] ---话题通信](https://ucc.alicdn.com/pic/developer-ecology/nlrwbhh5km45g_f88279ec64344ac89796e82d736d3c08.png)
[ROS通信机制] ---话题通信
1 话题通信模型话题通信模型涉及三个角色,如下图所示:ROS master : 管理者Talker / Publisher :发布者Listener / subscriber :订阅者ROS Master 负责保管 Talker 和 Listener 注册的信息,并匹配话题相同的 Talker 与 ...
[ROS通信机制] ---话题通信之自定义msg类型
0 自定义msg引入背景在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传...
ROS学习-理解ROS话题
首先,与上一个博客类似的:ROS学习-理解ROS节点 使用roscore启动ROS$ roscore注意,当前只能运行一个roscore,如果上一个博客中没有关闭roscore,那么会提示类似于下述错误信息。roscore cannot run as another roscore/master i...
【古月21讲】ROS入门系列(2)——发布者Publisher、订阅者Subscriber的编程实现+自定义话题消息编程实现
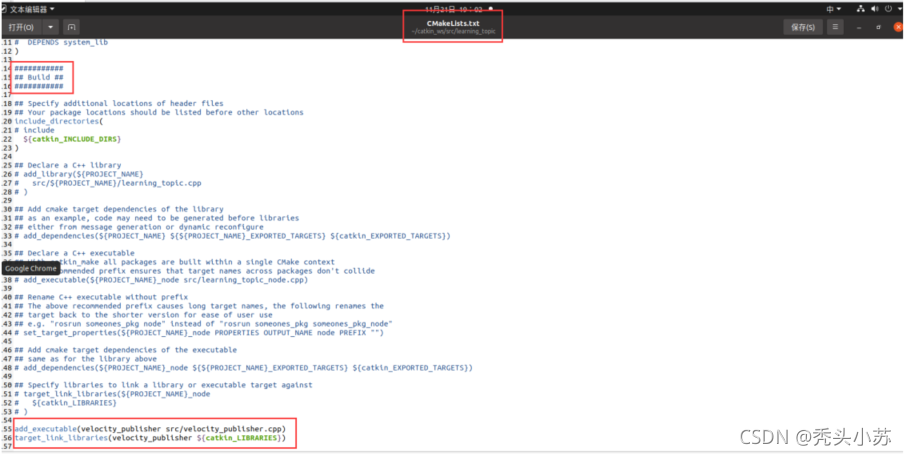
4、发布者Publisher的编程实现创建功能包cd ~/catkin_ws/src catkin_create_pkg learning_topic rospy roscpp std_msgs geometry_msgs turtlesim创建发布者代码(C++) ——文件名为velocity_p...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






