linux如何让ros文件在任何终端中运行:三行代码搞定
echo "source ~/你的ros文件目录/setup.bash" >> ~/.bashrcsource .bashrcrosrun ros文件的包名 ros文件节点名
![奥比中光ROS启动节点运行异常退出:[camera/driver-2] process has finished cleanly](https://ucc.alicdn.com/pic/developer-ecology/5vfkqfpkagpwg_77035d0f7aa34b38bebd5c60bcf12cdc.png)
奥比中光ROS启动节点运行异常退出:[camera/driver-2] process has finished cleanly
笔者的场景是嵌入式板和主机通信一开始正常,几秒后异常退出,程序中断经过日志排查[0m[ INFO] [1648798793.101583194]: Loading nodelet /camera/driver of type astra_camera/AstraDriverNodelet to ma...


ROS-编写并运行模板|学习笔记
开发者学堂课程【阿里云资源编排 ROS 使用教程:ROS-编写并运行模板】学习笔记,与课程紧密联系,让用户快速学习知识。课程链接:https://developer.aliyun.com/learning/course/410/detail/5261ROS-编写并运行模板 内容介绍:一、...
ros中运行launch文件提示无法找到的错误
在ros中已经运行了catkin_make以后,直接运行roslaunch 或者rosrun的命令后提示无法找到相应文件这时需在对应的工作空间中打开终端接着输入source devel/setup.bash再运行上述的roslaunch或者rosrun命令即可完成操作
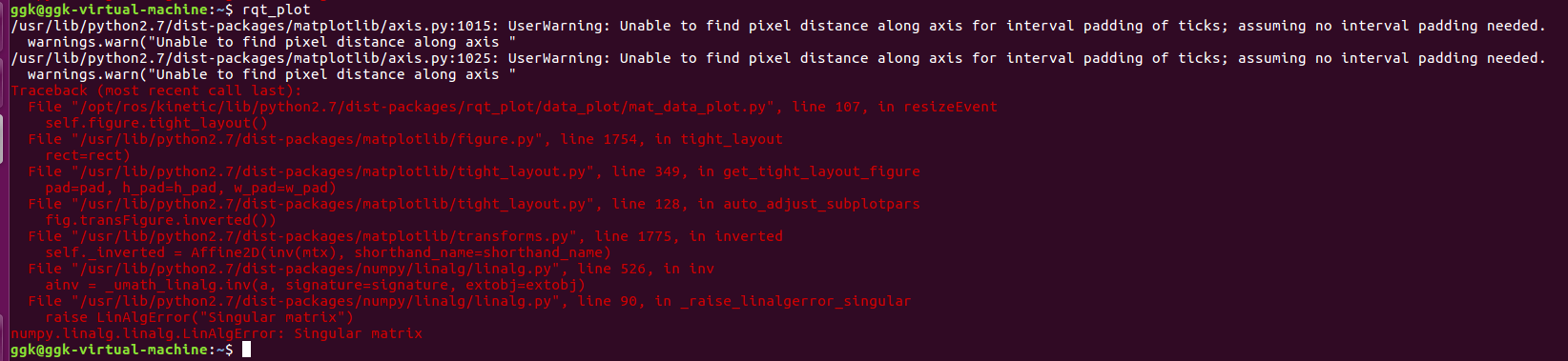
ROS入门笔记(五):ROS中运行rqt_plot的问题(kinetic)
1 问题rosrun rqt_plot rqt_plotggk@ggk-virtual-machine:~$ rosrun rqt_plot rqt_plot /usr/lib/python2.7/dist-packages/matplotlib/axis.py:1015: UserWarning:...
从零开始Ubuntu16.04+ORBSLAM2+ROS实验实录三:使用USB相机运行ORBSLAM
1 编译ROS_ORBSLAM2 启动ORBSLAM前文:从零开始Ubuntu16.04+ORBSLAM2+ROS实验实录(一):安装与配置从零开始Ubuntu16.04+ORBSLAM2+ROS实验实录(二):相机测试与标定1 编译ROS_ORBSLAM进入ORB_SLAM2项目根目录直接运行ch...
在ros环境下的RealsenceT265标定以及Vins mono运行
相机标定作为t265而言,虽然官方提供了标定的出厂内参rs-enumerate-devices -c可以获得,但是我们在vins和orbslam中仍然有可能需要自己标定数据,这里给出教程。首先我们要明确适用的模型,一般普通相机小孔模型即可,而鱼眼镜头则是适用KB4(Kannala-Brandt Ca...
ROS机器人程序设计(原书第2版)3.2.7 使用rqt_console和rqt_logger_level在运行时修改调试级别
3.2.7 使用rqt_console和rqt_logger_level在运行时修改调试级别 ROS中提供了一系列工具去管理日志信息。在ROS hydro中,我们有两个独立的GUI:rqt_logger_level设置节点或者指定日志记录器的日志记录级别;rqt_console对日志信息进行可视化、...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






