
ubuntu16.04下ROS操作系统学习笔记(八)机器人SLAM与 Gmapping-Hector_slam-Cartographer--ORB_SLAM(下)
接下来我们来启动演示一下:roslaunch mbot_gazebo mbot_laser_nav_gazebo.launchroslaunch mbot_navigation hector_demo.launchroslaunch mbot_teleop mbot_teleop.launch效果如...
ubuntu16.04下ROS操作系统学习笔记(八)机器人SLAM与 Gmapping-Hector_slam-Cartographer--ORB_SLAM(上)
做SLAM的硬件要求(不一定是必须的,看包和库的依赖):(1):差分轮式机器人,可以使用Twist速度指令控制,需要线速度和角速度。(2):需要激光雷达、深度摄像头等测距设备,可以获取环境深度信息。(3...


基于ROS gmapping slam 建立地图时遇到的问题
遇到问题:在 turtlebot3 的gazebo 仿真环境下通过rosbag 保存tf 和scan 的信息,然后通过回放rosbag 里的内容 再通过 gmapping slam_gmapping 进行地图建立 建图过程中出现如下问题[ WARN] [1584192934.752228918]: ...
ROS中阶笔记(八):机器人SLAM与自主导航—机器人自主导航
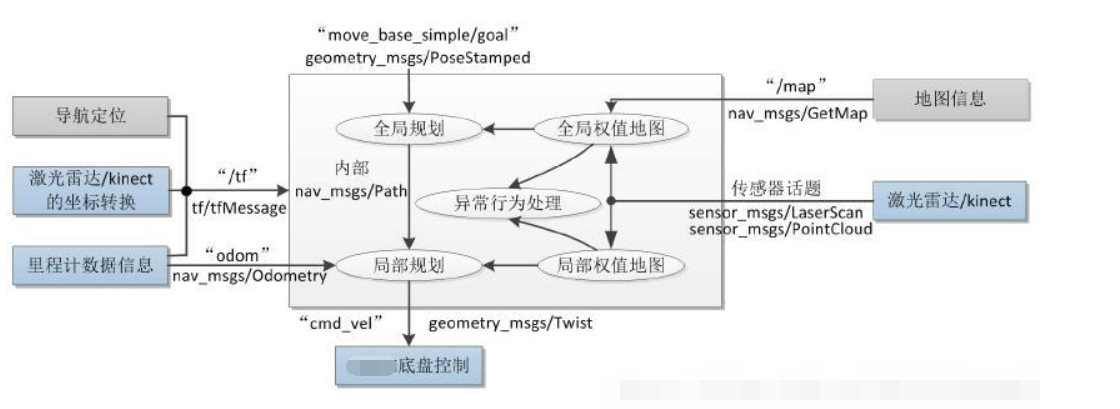
1 ROS中的导航框架1.1 move_base1.1.1 基于move_base的导航框架其中白色框内的是ROS已经为我们准备好的必须使用的组件,灰色框内的是ROS中可选的组件,蓝色的是用户需要提供的机器人平台上的组件。1.1.2 安装$ sudo apt-get install ros-kine...
ROS中阶笔记(七):机器人SLAM与自主导航—SLAM功能包的使用(下)
2.2.4 启动hector_slam演示分别开启三个终端运行以下命令:$ roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch # 动一个gazebo仿真节点 $ roslaunch mbot_navigation hector_demo.launc...
ROS中阶笔记(七):机器人SLAM与自主导航—SLAM功能包的使用(上)
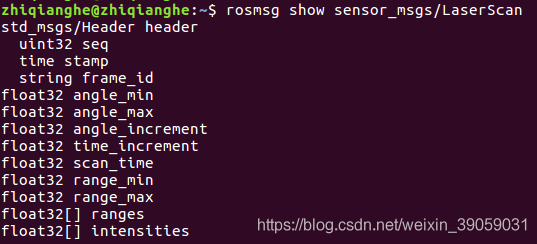
1 机器人必备条件1.1 硬件要求(1)差分轮式机器人,可使用twist速度指令控制$ rosmsg show geometry_msgs/Twist geometry_msgs/Vector3 linear # linear:xyz方向上的线速度,单位是m/s; float64 x float64...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






