ROS在线调试(使用GDB)
引言在写ROS工程代码,有时候找一个bug非常麻烦,尤其是运行时出错的bug,这时候借助一些调试器可以极大的提高查找bug的效率。ROS官方列出了许多可用的IDE:http://wiki.ros.org/IDEs,如VScode, Qtcreator, Ecllipse, Clion等,而这些不方便...
ROS机器人程序设计(原书第2版)3.2.7 使用rqt_console和rqt_logger_level在运行时修改调试级别
3.2.7 使用rqt_console和rqt_logger_level在运行时修改调试级别 ROS中提供了一系列工具去管理日志信息。在ROS hydro中,我们有两个独立的GUI:rqt_logger_level设置节点或者指定日志记录器的日志记录级别;rqt_console对日志信息进行可视化、...

ROS机器人程序设计(原书第2版)3.1.1 使用gdb调试器调试ROS节点
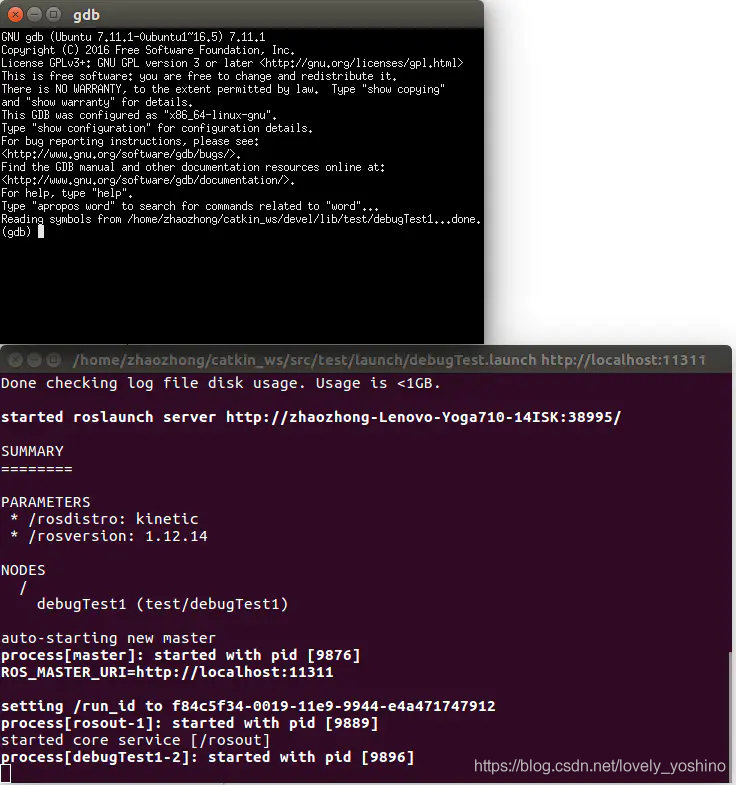
3.1.1 使用gdb调试器调试ROS节点 为了使用gdb调试器调试一个C/C++节点,唯一要知道的是可执行节点的路径。在ROS hydro和catkin功能包中,节点的可执行文件在工作空间的devel/lib/<package>文件下。例如,为了在gdb中运行chapter3_tuto...
ROS机器人程序设计(原书第2版)3.1 调试ROS节点
3.1 调试ROS节点 ROS节点可以像正常程序一样调试。调试程序在系统中运行时有一个进程号(PID)。你可以用任何标准工具(如gdb)进行调试。同样可以用valgrind检查内存泄漏,或者用callgrind分析算法性能。请记住使用下面的命令运行一个节点: 很遗憾,你不能通过下面的方...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






