ubuntu16.04下ROS操作系统学习笔记(五)gazebo物理仿真环境搭建、加载服务端模型数据减少报错
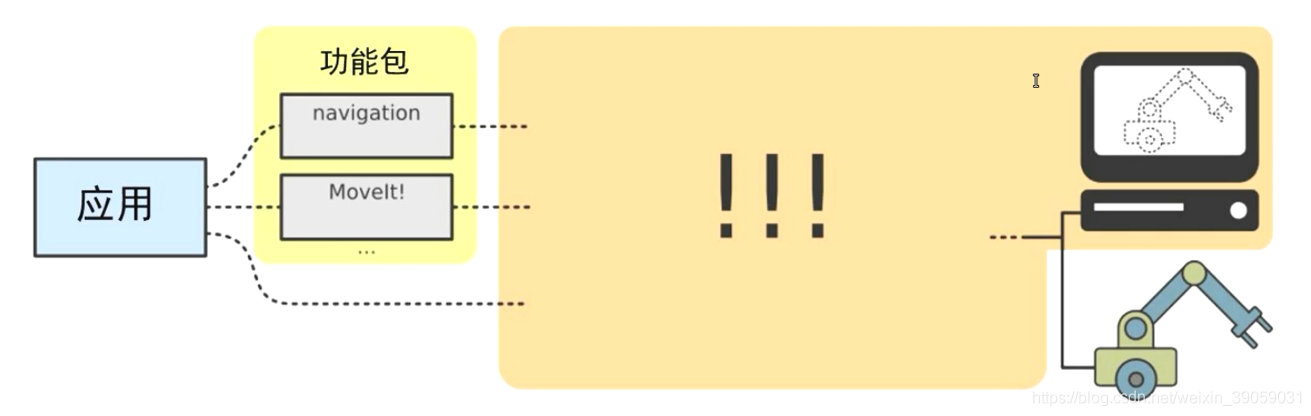
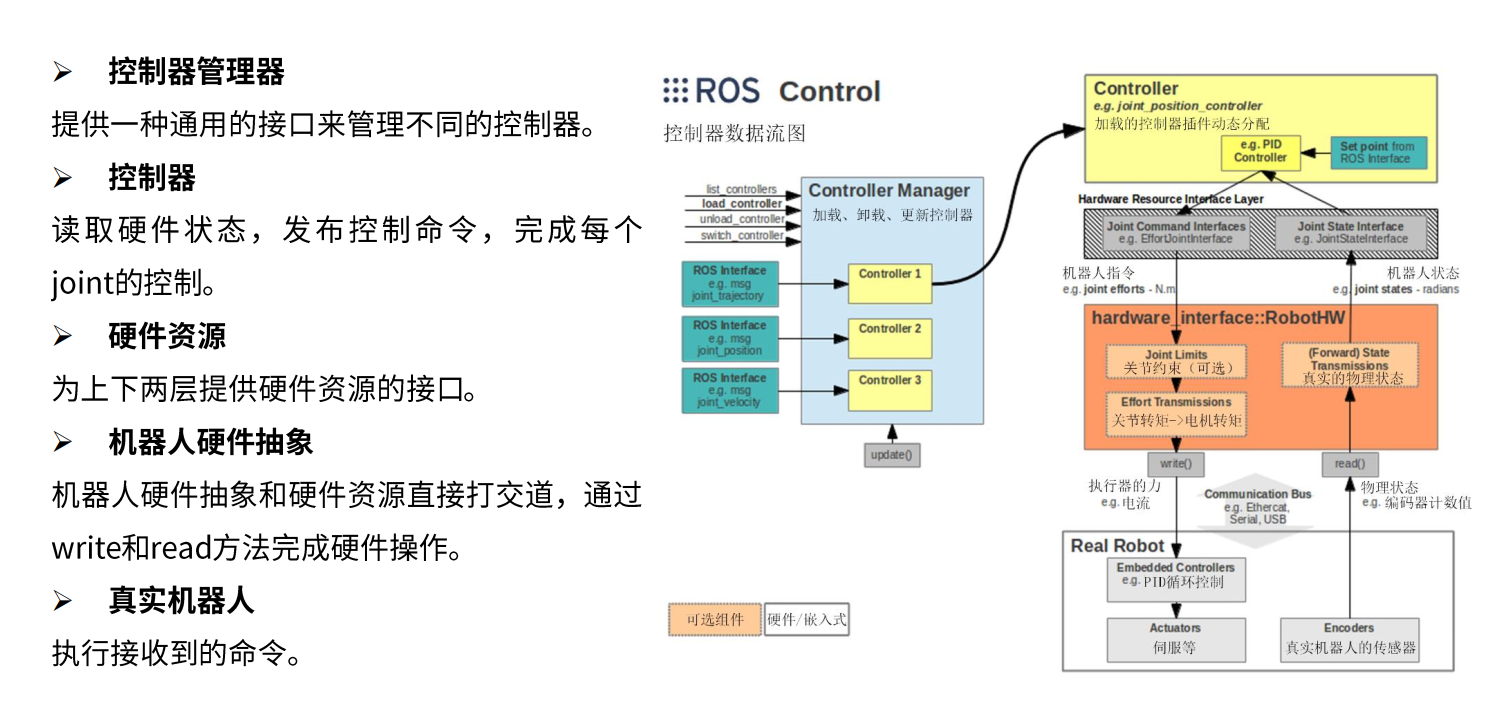
ROS_ControlROS为开发者提供的机器人控制中间件。包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等。可以帮助机器人应用功能包快速落地,提高开发效率。ros_control的定位就是上层应用功能包和底层接口之间的连接的。控制器有一些插件,通过硬件抽象层来对其进行控制。上层应用计...
ROS中阶笔记(四):机器人仿真—Gazebo物理仿真环境搭建(重点)
1 ros_controlROS为开发者提供的机器人控制中间件包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等可以帮助机器人应用功能包快速落地,提高开发效率Controller_manager 与很多controller都已经很完善了,需要写的就是robothw部分ros_contro...

QT ros环境搭建以及打包发布
第一步 下载 Q T 并安装1 1 官网( http://download.qt.io/archive/qt/5.13/5.13.0/)下载 qt 安装包qt-opensource-linux-x64-5.13.0.run1 2 给安装 run 文件增加执行权限并运行,安装选项全选,路径默认sudo...
ROS(7):Lubuntu i386环境搭建ROS环境
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48466543 未经博主允许不得转载。 博主地址是:http://blog.csdn.net/freewebsys 1,关于Lubuntu Lubuntu是Ubuntu快速、轻量级且...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






