ubuntu16.04下ROS操作系统学习笔记(九)Moveit(下)
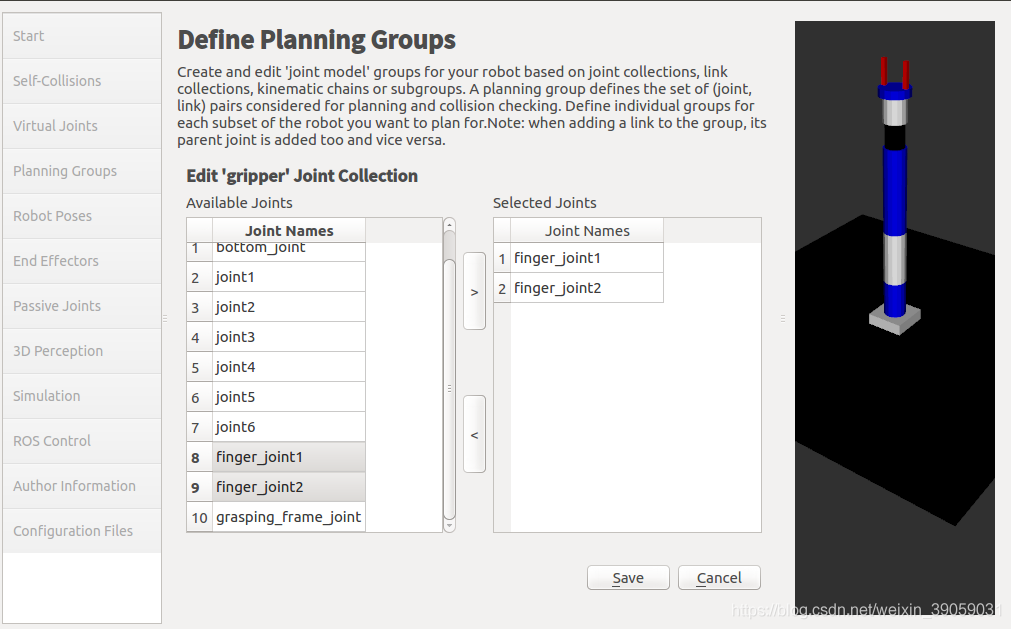
添加之后,我们点击save。之后双击手指下面的links,添加如下参数:这样的话我们就完成了机械臂部分的配置了:接下来配置Robot Poses这一步是去配置一些自定义的点位,点击右下角的Add Pose。命名为home,之后点击save:这样的话我们之后就可以通过调用的方式直接将这个home调用出...
ubuntu16.04下ROS操作系统学习笔记(九)Moveit(上)
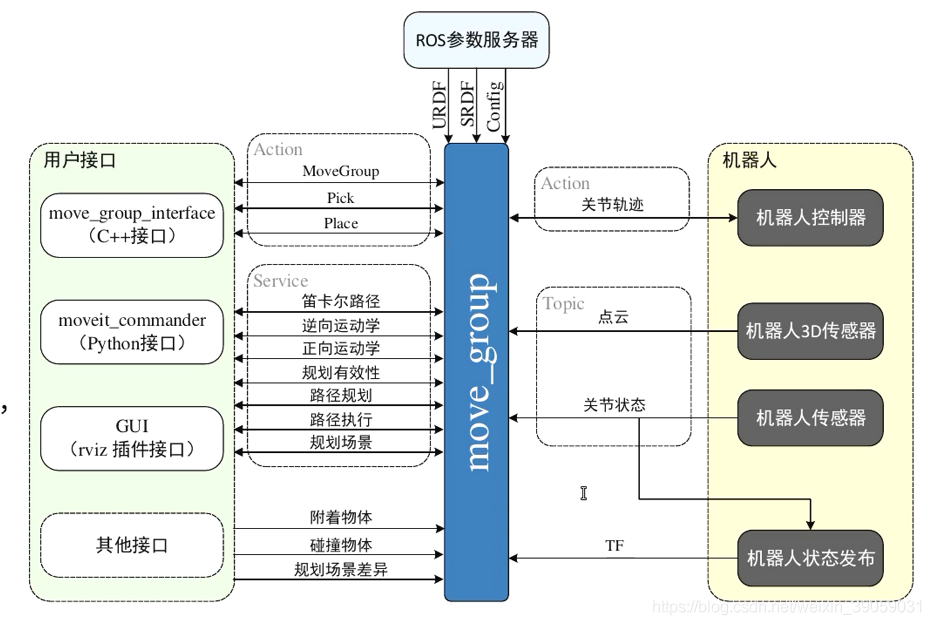
Moveit的前身是PR2机器人的机械臂的代码包,之后被集成为一个软件包。它不仅可以实现单个机械臂的控制。而且可以实现两个机械臂的协调控制。而且可以RGB摄像头采集外部障碍物信息,完成自主避障这样的功能。由一系列移动操作的功能包组成,运动规划,操作控制,3D感知,运动学,控制与导航算法。同时提供友好...


ubuntu16.04下ROS操作系统学习笔记(八)机器人SLAM与 Gmapping-Hector_slam-Cartographer--ORB_SLAM(下)
接下来我们来启动演示一下:roslaunch mbot_gazebo mbot_laser_nav_gazebo.launchroslaunch mbot_navigation hector_demo.launchroslaunch mbot_teleop mbot_teleop.launch效果如...
ubuntu16.04下ROS操作系统学习笔记(八)机器人SLAM与 Gmapping-Hector_slam-Cartographer--ORB_SLAM(上)
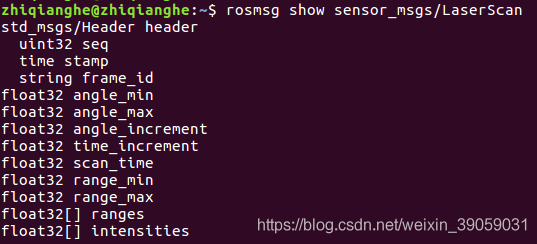
做SLAM的硬件要求(不一定是必须的,看包和库的依赖):(1):差分轮式机器人,可以使用Twist速度指令控制,需要线速度和角速度。(2):需要激光雷达、深度摄像头等测距设备,可以获取环境深度信息。(3...

ubuntu16.04下ROS操作系统学习笔记(三 / 一)ROS基础-工作空间
主要知识点:1.src、build、devel、install各文件夹的功能介绍。2.创建工作空间(创建文件夹,初始化工作空间)、编译工作空间、设置环境变量,检查环境变量(echo $ROS_PACKAGE_PATH)3.创建功能包:catkin_create_pkg <pack...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






