ROS机器人操作系统
ROS机器人操作系统为机器人软件开发所设计的电脑操作系统架构,起源于斯坦福大学人工智能实验室。 其中ROS的发行版本:Melodic Morenia,适用平台:Ubuntu Bionic(18.04)。现将本课程中常见释义总结如下: ROS的构成:基于TCP/IP的分布式通信机制、开发工...

机器人操作系统ROS 编程开发--详细总结
最近工作涉及到自动驾驶的,需要学习ROS,学习中总结了一些知识点,分享给大家。ROS基本介绍 机器人操作系统ROS,是一种分布式处理框架(又名Nodes),ROS常用C++和python编程语言开发;(这里项目开发采用C++ 11版本&#...

ROS与操作系统版本对应关系
Ubuntu和ROS1版本对应关系及官方支持结束时间,加粗的为还在支持的版本,(Recommended)为官方建议使用版本。 UbuntuROS1Release dateEnd of Life14.04 LTSindigo lglooJuly 22nd, 2014April, 201916.04 L...
ubuntu16.04下ROS操作系统学习笔记(九)Moveit(下)
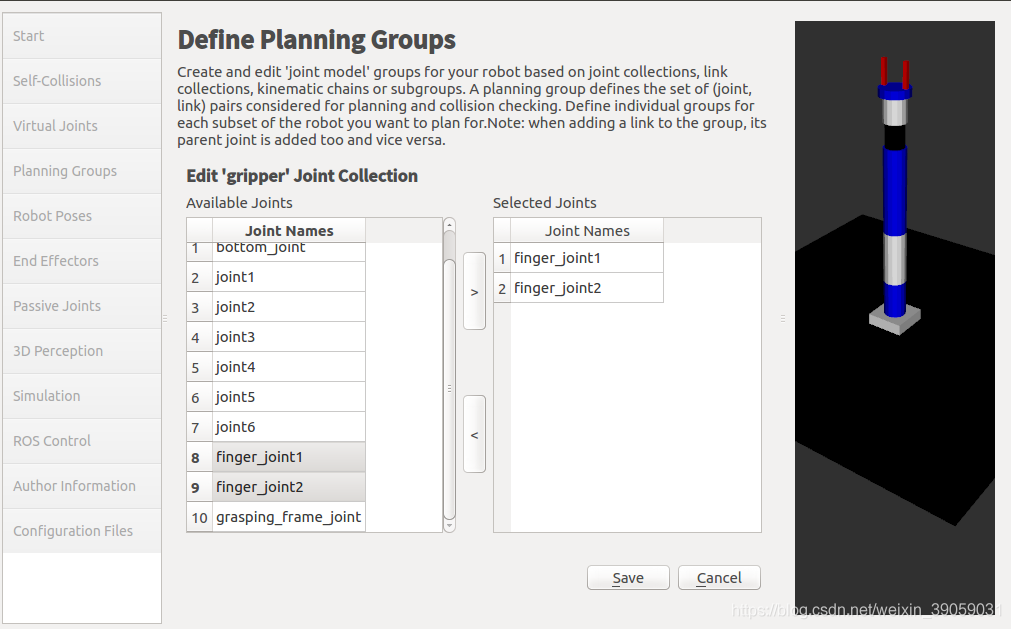
添加之后,我们点击save。之后双击手指下面的links,添加如下参数:这样的话我们就完成了机械臂部分的配置了:接下来配置Robot Poses这一步是去配置一些自定义的点位,点击右下角的Add Pose。命名为home,之后点击save:这样的话我们之后就可以通过调用的方式直接将这个home调用出...
ubuntu16.04下ROS操作系统学习笔记(九)Moveit(上)
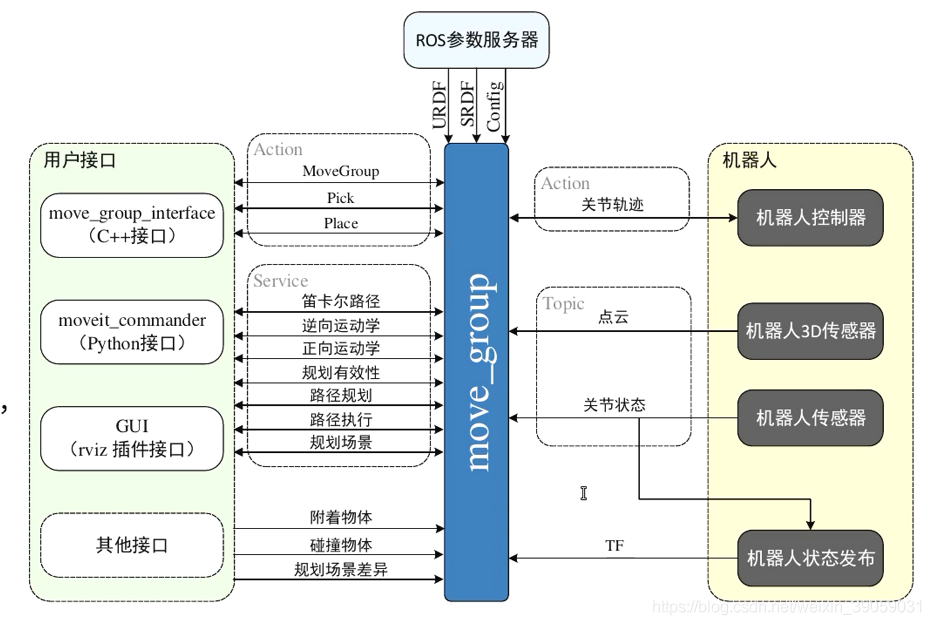
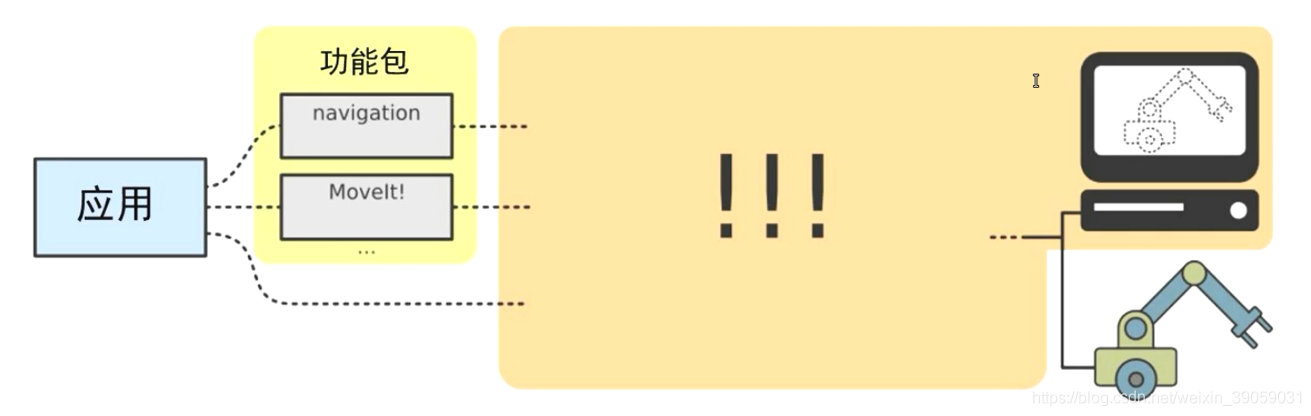
Moveit的前身是PR2机器人的机械臂的代码包,之后被集成为一个软件包。它不仅可以实现单个机械臂的控制。而且可以实现两个机械臂的协调控制。而且可以RGB摄像头采集外部障碍物信息,完成自主避障这样的功能。由一系列移动操作的功能包组成,运动规划,操作控制,3D感知,运动学,控制与导航算法。同时提供友好...

ubuntu16.04下ROS操作系统学习笔记(八)机器人SLAM与 Gmapping-Hector_slam-Cartographer--ORB_SLAM(下)
接下来我们来启动演示一下:roslaunch mbot_gazebo mbot_laser_nav_gazebo.launchroslaunch mbot_navigation hector_demo.launchroslaunch mbot_teleop mbot_teleop.launch效果如...
ubuntu16.04下ROS操作系统学习笔记(八)机器人SLAM与 Gmapping-Hector_slam-Cartographer--ORB_SLAM(上)
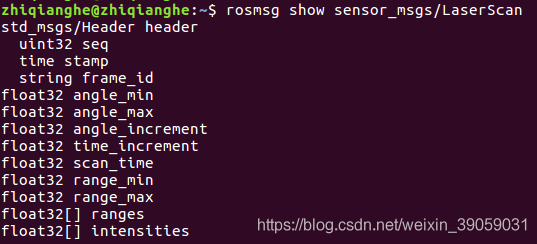
做SLAM的硬件要求(不一定是必须的,看包和库的依赖):(1):差分轮式机器人,可以使用Twist速度指令控制,需要线速度和角速度。(2):需要激光雷达、深度摄像头等测距设备,可以获取环境深度信息。(3...
ubuntu16.04下ROS操作系统学习笔记(六 )机器视觉-摄像头标定-ROS+OpenCv-人脸识别-物体跟踪-二维码识别(下)
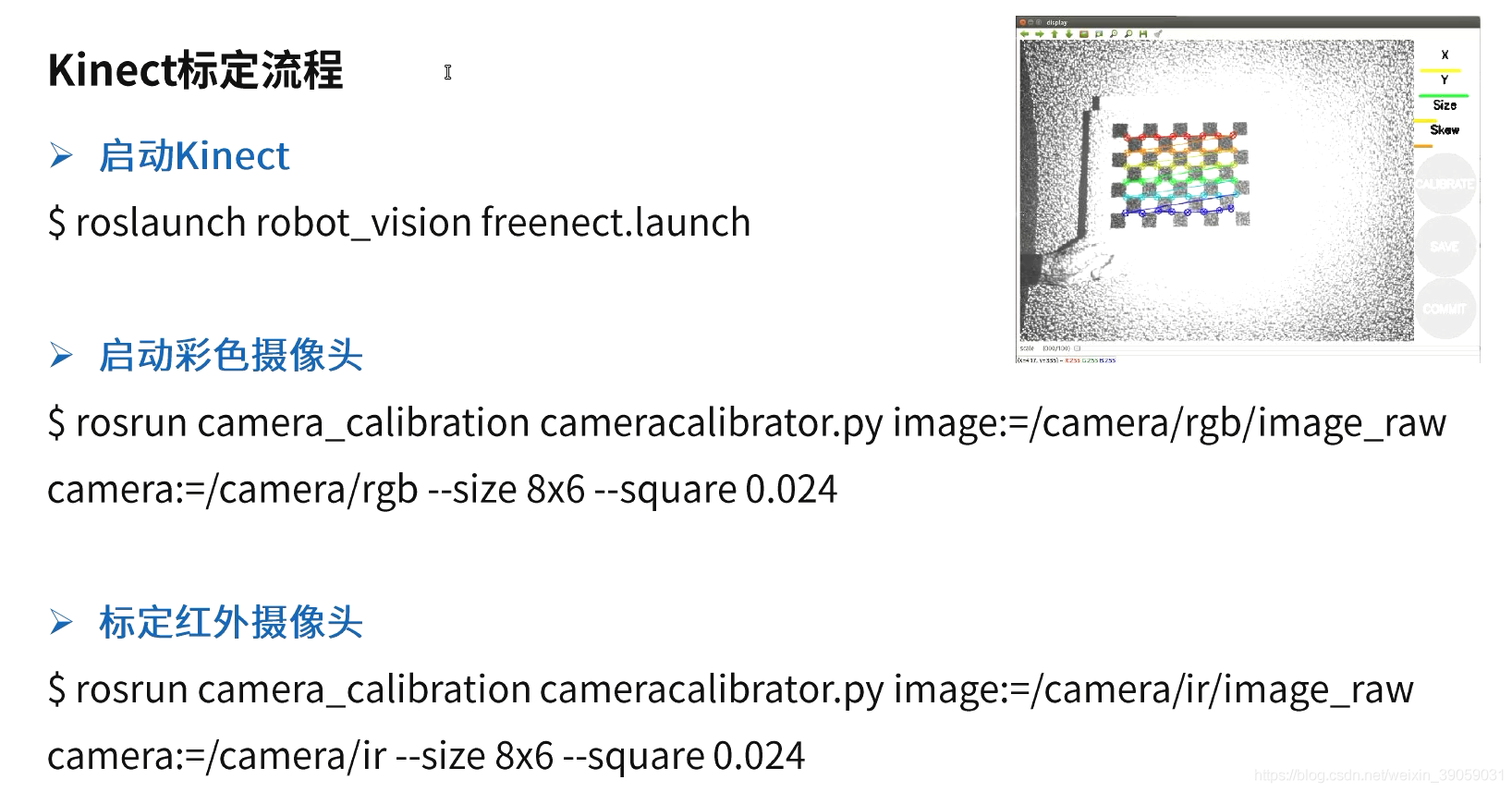
Kinetic标定:之后的操作都类似,具体可以参考原视频。OpencvOpen Source Computer Vision Library在ROS当中完成Opencv的安装:sudo apt-get install ros-kinetic-vision-opencv libopencv-dev p...
ubuntu16.04下ROS操作系统学习笔记(六 )机器视觉-摄像头标定-ROS+OpenCv-人脸识别-物体跟踪-二维码识别(上)
ROS中的图像数据。摄像头标定。ROS+Opencv应用实例(人脸识别、物体跟踪)。二维码识别。扩展内容:物体识别与机器学习。启动摄像头:没有安装的话参照下面命令安装一下:sudo apt-get install ros-kinetic-usb-cam安装完成之后就可以启动摄像头了:ro...
ubuntu16.04下ROS操作系统学习笔记(五)gazebo物理仿真环境搭建、加载服务端模型数据减少报错
ROS_ControlROS为开发者提供的机器人控制中间件。包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等。可以帮助机器人应用功能包快速落地,提高开发效率。ros_control的定位就是上层应用功能包和底层接口之间的连接的。控制器有一些插件,通过硬件抽象层来对其进行控制。上层应用计...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






