ROS入门笔记(十三):分布式通信
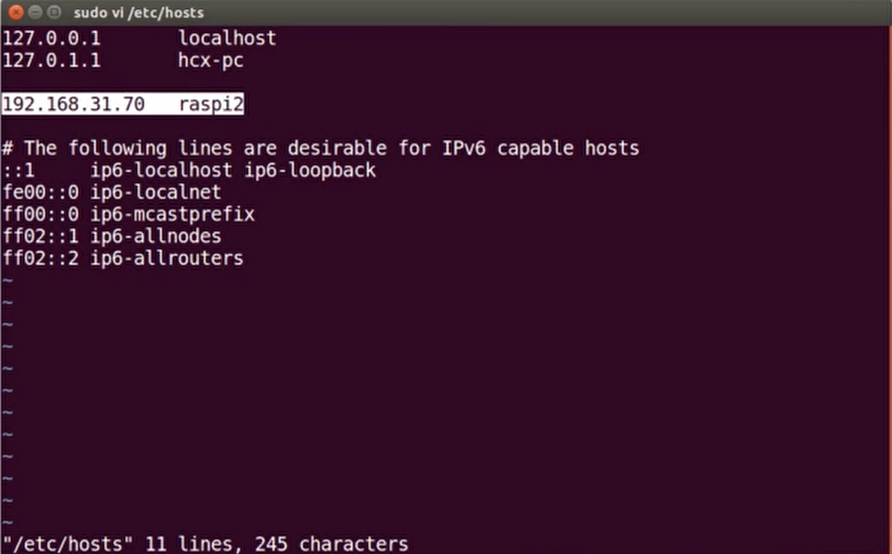
ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合。01 如何实现分布式多机通信1.1 设置IP地址,确保底层链路的连通步骤一,树莓派和电脑必须在同一个局域网。步骤二,输入ifconfig,查看两台计算机(ggk-pc,raspi2)的IP地址;步骤三ÿ...
ROS入门笔记(九):编写ROS的第一个程序hello world(重点)
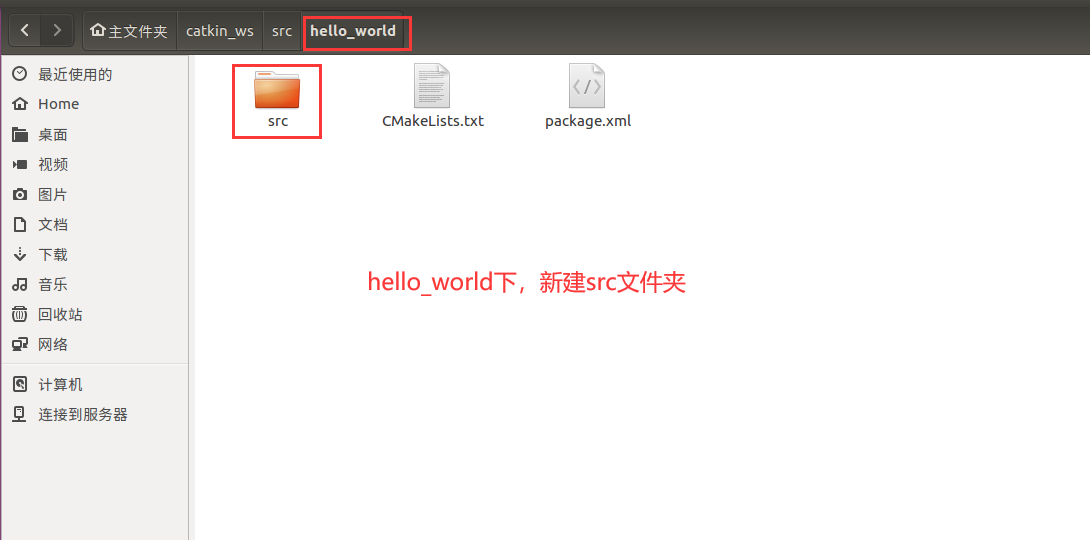
1 Catkin工作空间工作空间(workspace)是一个存放工程开发相关文件的文件夹。src:代码空间(Source Space) build:编译空间(Build Space) devel:开发空间(Development Space) ...

ROS入门笔记(七):详解ROS文件系统(下)
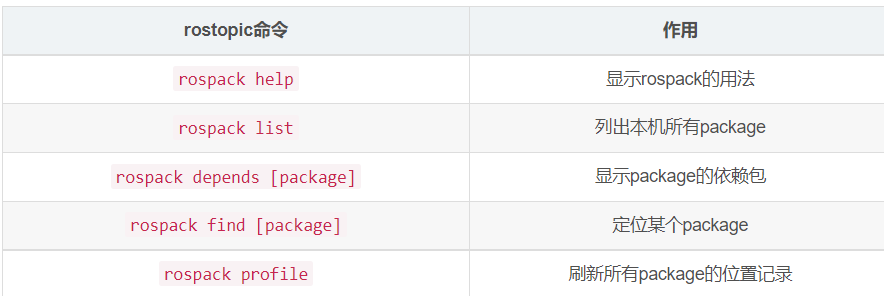
04 Package软件包ROS程序只有组成package才能编译;package是ROS源代码存放的地方;ROS的代码无论是C++还是Python都要放到package中,这样才能正常的编译和运行;一个package可以编译出来多个目标文件(ROS可执行程序、动态静态库、头文件等等)。4.1 p....
ROS入门笔记(七):详解ROS文件系统(上)
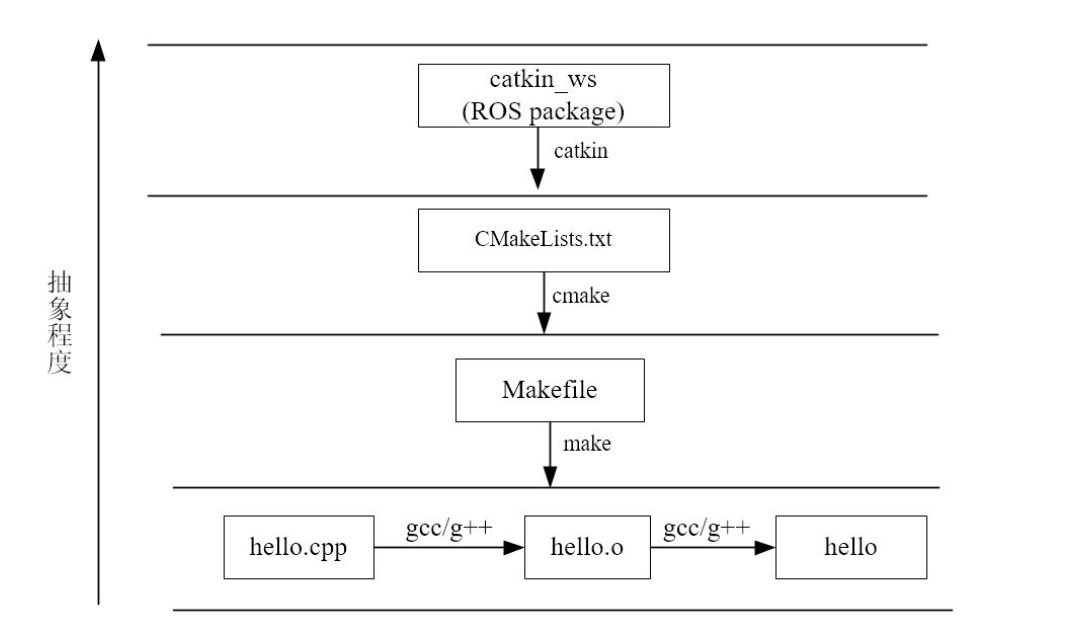
本章主要介绍了ROS的工程结构,也就是ROS的文件系统结构。要学会建立一个ROS工程,首先要认识一个ROS工程,了解它们的组织架构,从根本上熟悉ROS项目的组织形式,了解各个文件的功能和作用,才能正确的进行开发和编程。本章的主要内容有,介绍catkin的编译系统,catkin工作空间的...

ROS入门笔记(六): ROS系统架构
1 ROS系统架构1.1 文件系统(重点)文件系统:主要指在硬盘里能看到的ROS目录和文件:1)元功能包(Meta Packages):组织多个用于同一目的功能包。2)元功能包清单(Meta Packages):类似于功能包清单&...
ROS入门笔记(四):ROS实践(小海龟仿真)— ROS Topics
1 基础知识1.1 运行ROS Master所在主机的资源地址ROS是分布式的软件框架,ROS Master可能分布在某一台主机上,ROS Master在整个系统中只能存在一个,其他的很多主机必须要知道当前的ROS Master在什么位置。退出ROS Master:Ctrl C1.2 ROS常用命令...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






