[帮助文档] ROS CDK入门应用示例
本文以创建阿里云专有网络(VPC)实例及其关联的交换机(vSwitch)实例为例,介绍在不同语言环境下如何使用ROS CDK。
【古月21讲】ROS入门系列(4)——参数使用与编程方法、坐标管理系统、tf坐标系广播与监听的编程实现、launch启动文件的使用方法
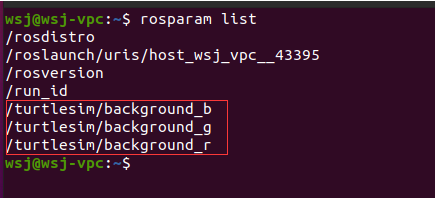
1、参数的使用与编程方法创建功能包cd ~/catkin_ws/src catkin_create_pkg learning_parameter roscpp rospy std_srvs 2.相关参数命令使用rosparam list 列出当前所有参数注意上图红色框图部分,这里可能和RO...

【古月21讲】ROS入门系列(3)——客户端Client、服务器Server的编程实现+自定义服务数据编程实现
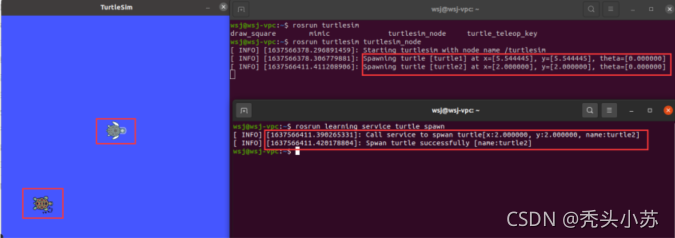
7、客户端Client的编程实现创建功能包cd ~/catkin_ws/src catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim创建客户端代码(C++) ——文件名为turtle_spaw...
【古月21讲】ROS入门系列(2)——发布者Publisher、订阅者Subscriber的编程实现+自定义话题消息编程实现
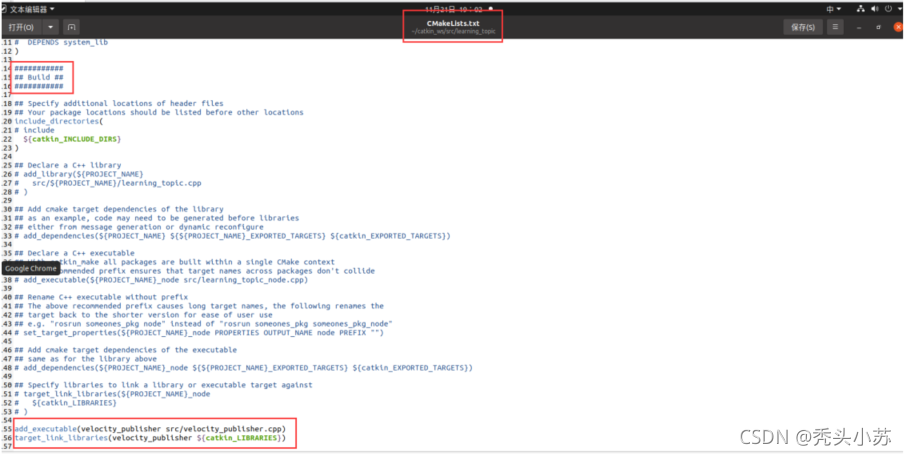
4、发布者Publisher的编程实现创建功能包cd ~/catkin_ws/src catkin_create_pkg learning_topic rospy roscpp std_msgs geometry_msgs turtlesim创建发布者代码(C++) ——文件名为velocity_p...
【古月21讲】ROS入门系列(1)——ROS命令工具的使用及创建工作空间和功能包
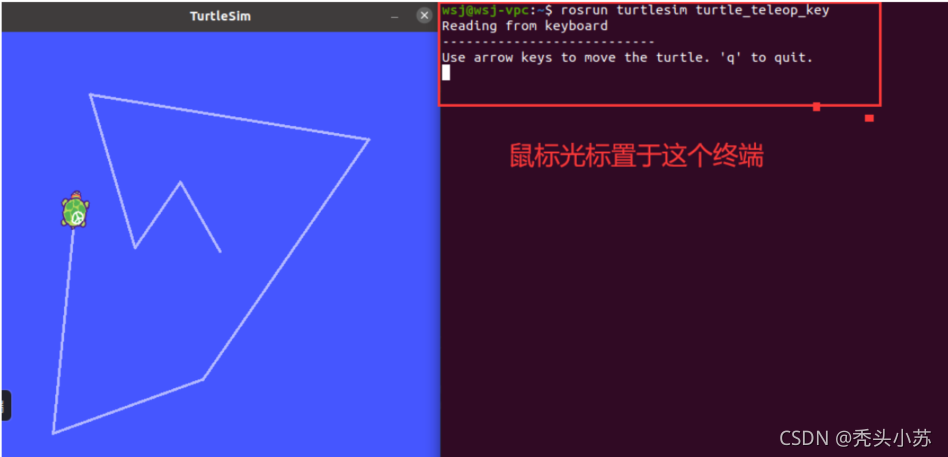
1、运行海龟仿真器证明ROS安装成功运行海龟仿真器共分为三步,如下:启动ROS Masterroscore 2.启动小海龟仿真器rosrun turtlesim turtlesim_node 3.启动海龟控制节点rosrun turtlesim turtle_teleop_key注:这三行代码需要在...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






