ROS中阶笔记(九):Movelt!机械臂控制
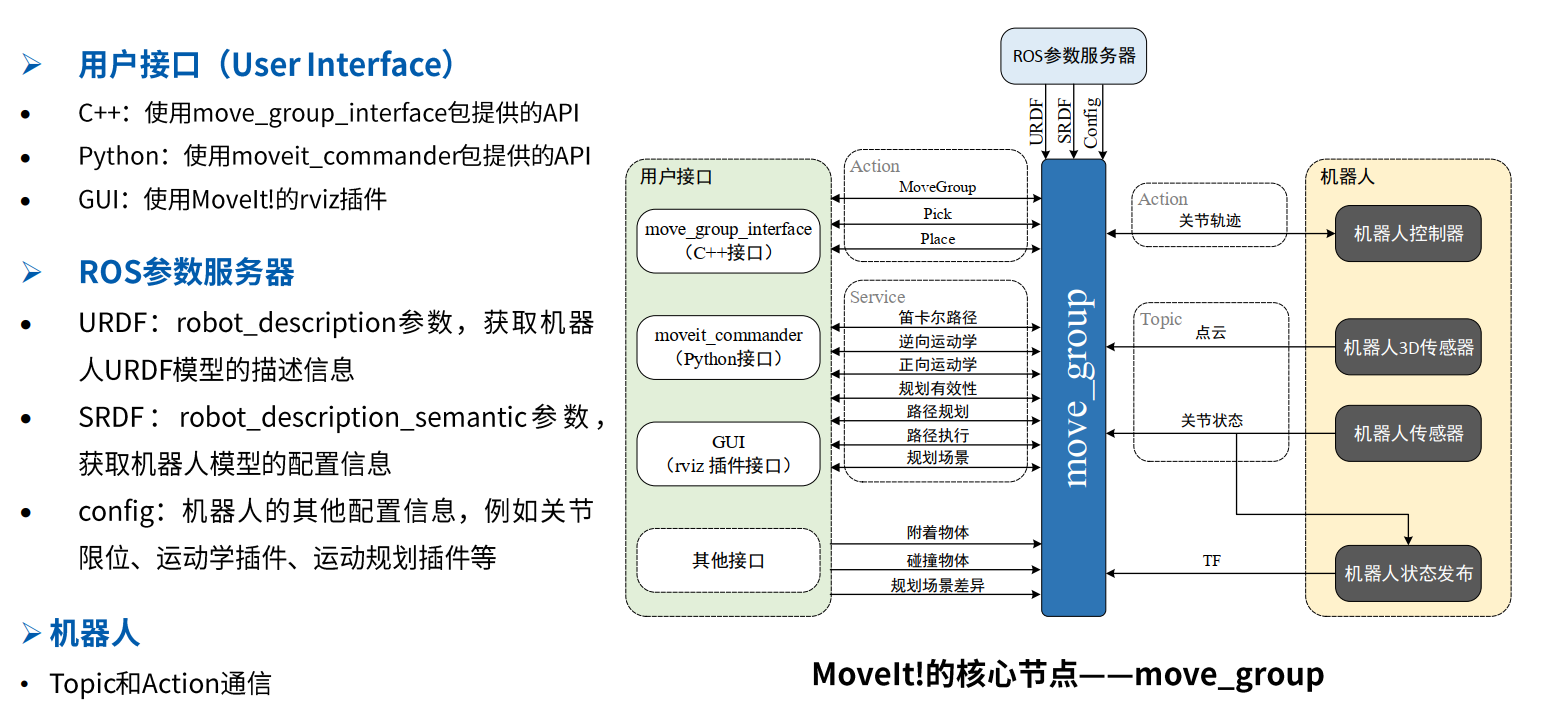
1 Movelt!系统架构1.1 Movelt!是什么一个易于使用的集成化开发平台由一系列移动操作的功能包组成· 运动规划· 操作控制· 3D感知· 运动学· 控制与导航算法提供友好的GUI可应用于工业、商业、研发和其他领域ROS社区中使用度排名前三的功能包1.2 系统架构1.3 Movelt!使用...
kinetic+ubuntu16.04使用ROS驱动UR3机械臂过程全纪录
1 下载驱动包git clone - b $ DISTRO - devel github.com/ros-industr…2驱动包新版本修改 如果你的 UR软件版本> = 3.0,就需要把ur_driver替换成ur_modern_driver下载ur_modern_driver git cl...

ROS驱动UR机械臂
1 Ubuntu,最高16.04 安装ros- kinetic -universal-robot2 下载ros-industrial/universal_robot包并构建catkin工程sudo apt-get install ros-kinetic-universal-robotcd catki...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






