
ROS入门笔记(六): ROS系统架构
1 ROS系统架构1.1 文件系统(重点)文件系统:主要指在硬盘里能看到的ROS目录和文件:1)元功能包(Meta Packages):组织多个用于同一目的功能包。2)元功能包清单(Meta Packages):类似于功能包清单&...
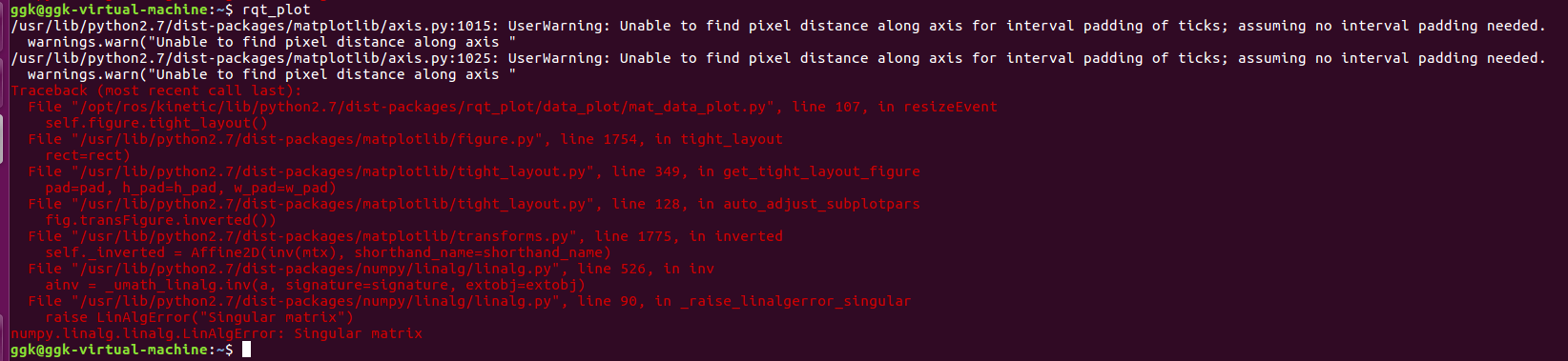
ROS入门笔记(五):ROS中运行rqt_plot的问题(kinetic)
1 问题rosrun rqt_plot rqt_plotggk@ggk-virtual-machine:~$ rosrun rqt_plot rqt_plot /usr/lib/python2.7/dist-packages/matplotlib/axis.py:1015: UserWarning:...

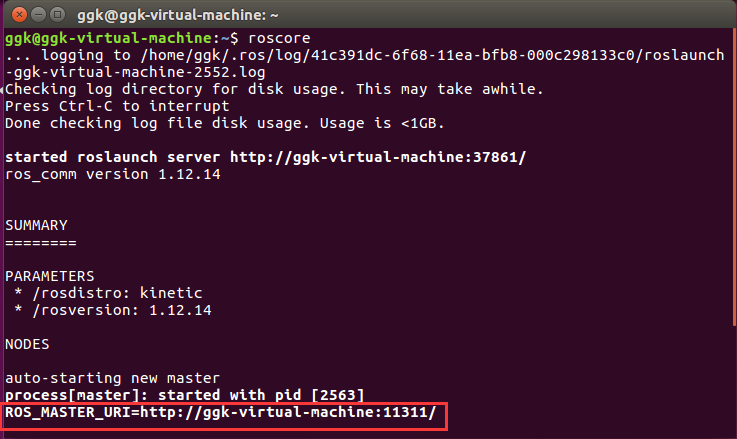
ROS入门笔记(四):ROS实践(小海龟仿真)— ROS Topics
1 基础知识1.1 运行ROS Master所在主机的资源地址ROS是分布式的软件框架,ROS Master可能分布在某一台主机上,ROS Master在整个系统中只能存在一个,其他的很多主机必须要知道当前的ROS Master在什么位置。退出ROS Master:Ctrl C1.2 ROS常用命令...

ROS入门笔记(三):二进制包与源代码包
注意: 如果你是使用类似apt这样的软件管理器来安装ROS的,那么安装后这些软件包将不具备写入权限,当前系统用户比如你自己也无法对这些软件包进行修改编辑。当你的开发涉及到ROS软件包源码层面的操作或者在创建一个新的ROS软件包时,你应该是在一个具备读写权限的目录下工作,就像在你当前系统用户的home...
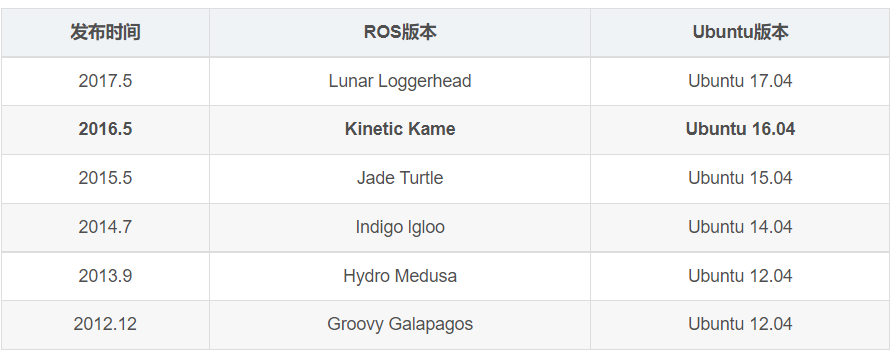
ROS入门笔记(二):ROS安装与环境配置及卸载(重点)
1 ROS安装步骤1.1 ROS版本ROS目前只支持在Linux系统上安装部署, 它的首选开发平台是Ubuntu注:如果Ubuntu版本和ROS版本不对应的话,安装就不会成功了~笔者使用的平台是Ubuntu 16.04, ROS版本是Kinetic。说明:Ubuntu官方下载网址https://ww...
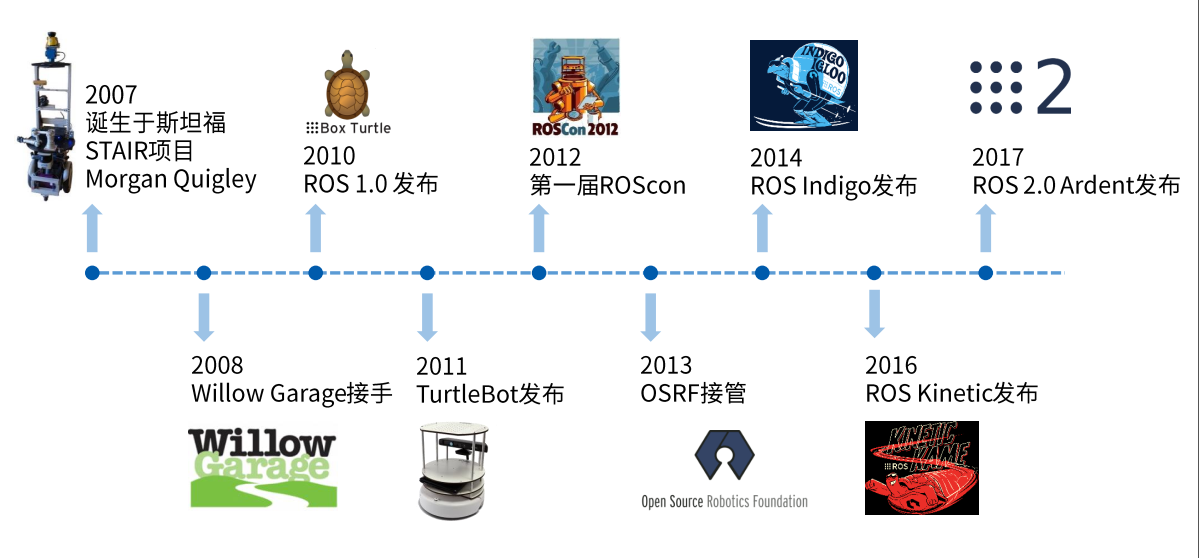
ROS入门笔记(一): ROS简介
1 ROS是什么?机器人操作系统(Robot Operating System, ROS)是一个应用于机器人上的操作系统,它操作方便、功能强大,特别适用于机器人这种多节点多任务的复杂场景。说明:ROS是一个适用于机器人编程的框架, 这个框架把原本松散的零部件耦合在了一起, 为他们提供了通信架构。 R...
【古月21讲】ROS入门系列(4)——参数使用与编程方法、坐标管理系统、tf坐标系广播与监听的编程实现、launch启动文件的使用方法
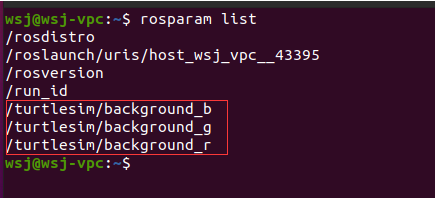
1、参数的使用与编程方法创建功能包cd ~/catkin_ws/src catkin_create_pkg learning_parameter roscpp rospy std_srvs 2.相关参数命令使用rosparam list 列出当前所有参数注意上图红色框图部分,这里可能和RO...
【古月21讲】ROS入门系列(3)——客户端Client、服务器Server的编程实现+自定义服务数据编程实现
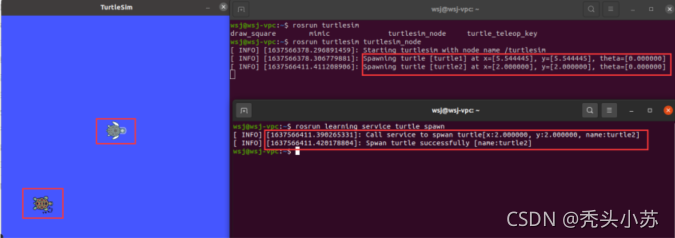
7、客户端Client的编程实现创建功能包cd ~/catkin_ws/src catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim创建客户端代码(C++) ——文件名为turtle_spaw...
【古月21讲】ROS入门系列(2)——发布者Publisher、订阅者Subscriber的编程实现+自定义话题消息编程实现
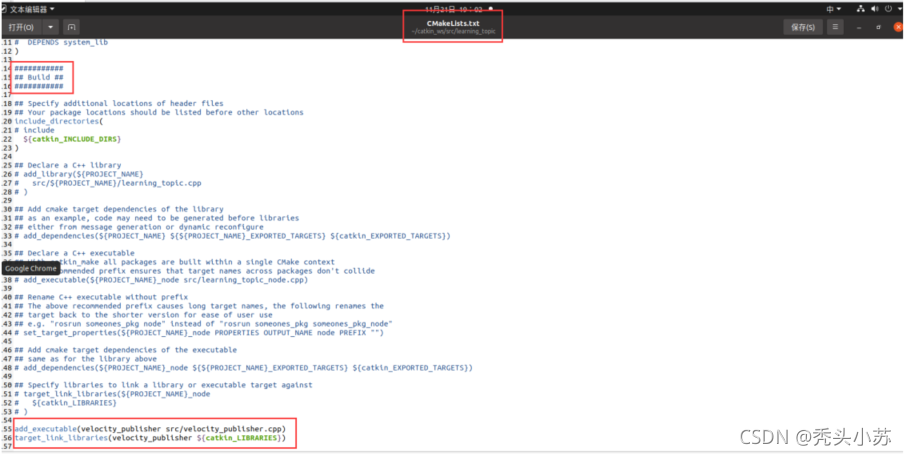
4、发布者Publisher的编程实现创建功能包cd ~/catkin_ws/src catkin_create_pkg learning_topic rospy roscpp std_msgs geometry_msgs turtlesim创建发布者代码(C++) ——文件名为velocity_p...
【古月21讲】ROS入门系列(1)——ROS命令工具的使用及创建工作空间和功能包
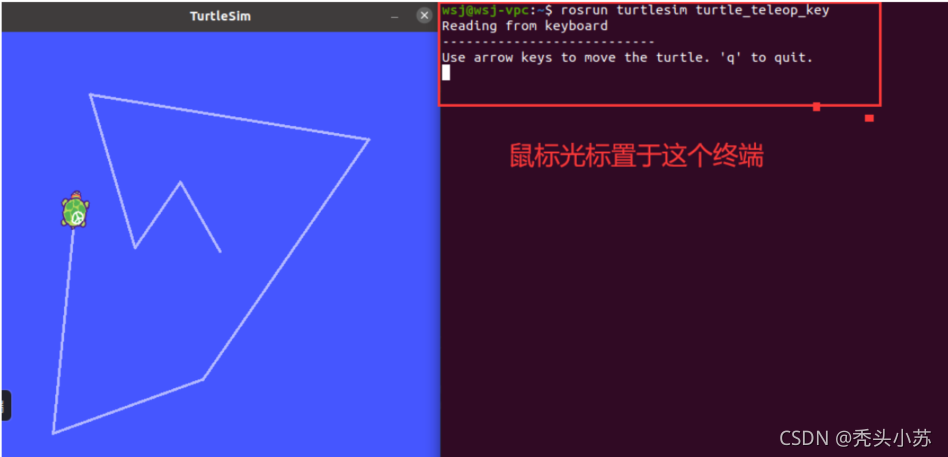
1、运行海龟仿真器证明ROS安装成功运行海龟仿真器共分为三步,如下:启动ROS Masterroscore 2.启动小海龟仿真器rosrun turtlesim turtlesim_node 3.启动海龟控制节点rosrun turtlesim turtle_teleop_key注:这三行代码需要在...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。






