强化深度学习中使用Dyna-Q算法确定机器人问题中不同规划的学习和策略实战(超详细 附源码)
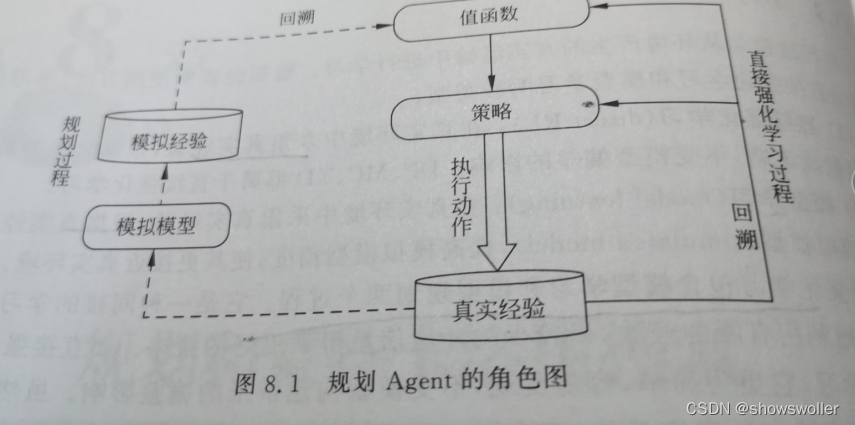
需要源码请点赞关注收藏后评论区留下QQ并且私信~~~一、模型、学习、规划简介1:模型Agent可以通过模型来预测环境并做出反应,这里所说的模型通常指模拟模型,即在给定一个状态和动作时,通过模型可以对下一状态和奖赏做出预测模型通常可以分为分布模型和样本模型两种类型分布模型:该模型可以生成所有可能的结果...
深度强化学习中利用Q-Learngin和期望Sarsa算法确定机器人最优策略实战(超详细 附源码)
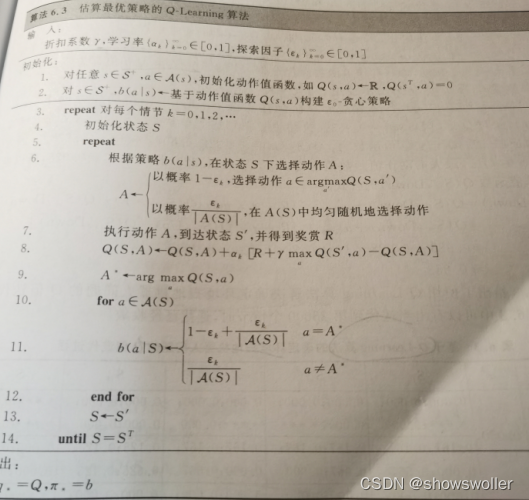
需要源码和环境搭建请点赞关注收藏后评论区留下QQ~~~一、Q-Learning算法Q-Learning算法中动作值函数Q的更新方向是最优动作值函数q,而与Agent所遵循的行为策略无关,在评估动作值函数Q时,更新目标为最优动作值函数q的直接近似,故需要遍历当前状态的所有动作,在所有状态都能被无限次访...

本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。









