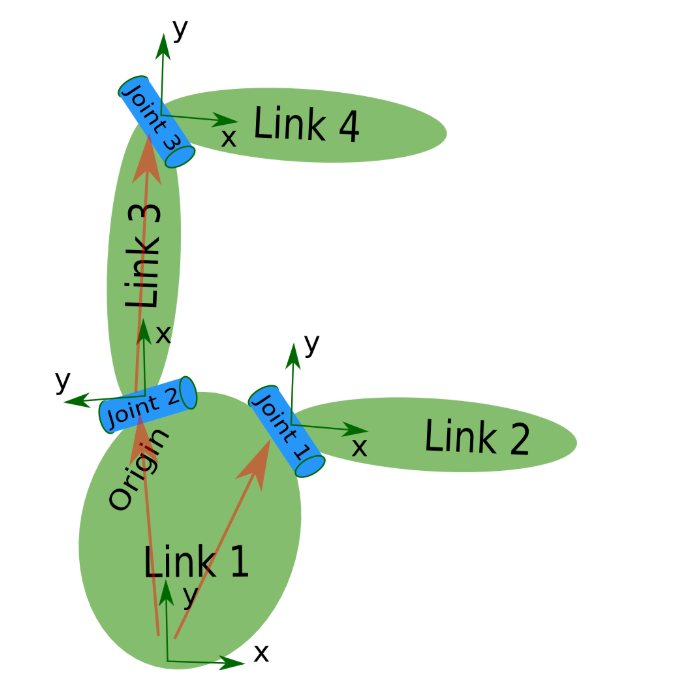
ROS中阶笔记(二):机器人系统设计—URDF机器人建模
01 URDF理论1.1 什么是URDFUnified Robot Description Format,统一机器人描述格式;ROS中一个非常重要的机器人模型描述格式;可以解析URDF文件中使用XML格式描述的机器人模型;ROS同时也提供URDF文件的C++解析器(可以在C++代码中直接解析UR.....
ROS中阶笔记(一):机器人系统设计—ROS系统下连接外部传感器
01 连接摄像头1.1 ROS下连接usb_camhttps://answers.ros.org/question/197651/how-to-install-a-driver-like-usb_cam/1.1.1 前期准备步骤一,虚拟机设置(vmware15.0 以上)在虚拟机菜单栏中选择“虚拟机...
本页面内关键词为智能算法引擎基于机器学习所生成,如有任何问题,可在页面下方点击"联系我们"与我们沟通。
产品推荐







机器人ros相关内容
- ros机器人编程技术
- ros机器人编程
- ros机器人实践
- ros机器人应用
- ros机器人运动
- ros机器人
- ros机器人系统
- ros中阶笔记机器人感知
- ros笔记机器人
- ros中阶笔记机器人感知机器视觉
- ros机器人程序设计
- ros机器人程序设计可视化
- ros机器人程序设计节点
- ros机器人程序设计动态参数
- ros机器人程序设计参数
- ros机器人服务
- ros机器人程序设计显示信息
- ros机器人程序设计信息
- ros机器人程序设计日志信息
- ros机器人程序设计调试节点
- ros机器人程序设计文件
- ros机器人程序设计服务
- ros机器人程序设计主题
- ros机器人程序设计包
- ros机器人程序设计工作空间
- ros机器人程序设计文件系统
- ros机器人程序设计安装
- ros机器人程序设计beaglebone black
- ros机器人程序设计安装rosinstall
- ros机器人程序设计配置环境
- ros机器人程序设计初始化rosdep
- ros机器人程序设计设置密钥
- 机器人安装ros
- ros机器人程序设计软件库
- ros机器人手臂